- CMOS kamery série C1×
- Přehled kamer C1×
- Systém kamer C1×
- CMOS senzory a elektronika kamery
- Chlazení a napájecí zdroj
- Mechanické specifikace
- Volitelné příslušenství
- Podpora software
- Dodávky a balení
- Galerie snímků
Přehled kamer C1×
Řada kamer C1× kombinuje velké
APS a „Full-Frame“ senzory, používané v kamerách C3, s
kompaktním tělem kamer C1+. Čelní průřez kamer C1× je stejný jako u kamer C1+, jen hlava
C1× je mírně delší, aby se dovnitř
vešla komplexnější elektronika a výkonnější chlazení (odsud
pochází označení celé série — C1 eXtended).
Podobně jako řada C1+ i kamery C1×
neobsahují mechanickou závěrku.
Použití velkých senzorů až do rozměru 24 × 36 mm si také
vyžádalo změnu adaptéru pro dalekohled nebo objektiv, adaptéry se
závity M42/M48 × 0,75, používané u kamer C1+,
jsou příliš malé pro tak velké senzory. Adaptér kamer C1× je tak vybaven novým závitem o rozměru
M56 × 1. Čelní plocha tohoto adaptéru
také obsahuje čtyři závitové otvory M3, což je stejné rozhraní,
jaké používají kamery C3 a kamery C1× tak jsou kompatibilní s externími filtrovými
koly a řadou dalších doplňků pro sérii kamer C3.
Bohatá programová podpora a ovladače dovolují použití kamer
C+× bez nutnosti investovat do
dalších programů. S kamerami zdarma dodávaný program SIPS dovoluje
řídit nejen kameru a filtrové kolo, ale kompletní pozorovací
sestavu až po synchronizaci kopule s montáží. Nicméně, ovladače
ASCOM (pro Windows) a INDI (pro Linux) a také nativní Linux
knihovny, rovněž zdarma ke stažení, dovolují integraci kamer
C1× s širokou paletou programů
třetích stran.
Kamery C1× jsou navrženy
pro spolupráci s řídicím počítačem (PC). Na rozdíl od např.
digitálních fotoaparátů, které pracují nezávisle na počítači,
vědecké kamery obvykle vyžadují počítač pro řízení práce,
stahování, zpracování a ukládání snímků atd. K ovládání kamery
je zapotřebí počítač, který:
Je kompatibilní se standardem PC a provozuje moderní 32
nebo 64 bitový operační systém Windows. Používá x86 nebo ARM procesor a provozuje 32 nebo
64 bitový operační systém Linux. Podporovány jsou také počítače Apple Macintosh s
procesory x64.
Kamery C+× používají ke spojení s
řídicím PC rozhraní USB 3.0, pracujícím na rychlosti 5 Gbps. Jsou
ale také kompatibilní s rozhraním a kabely USB 2.0.
Alternativně je možné použít rozhraní Moravian Camera
Ethernet Adapter. Tento adaptér dokáže připojit až 4 kamery
série Cx (s CMOS snímači) nebo Gx (s CCD snímači) a nabízí 1 Gbps
a 10/100 Mbps rozhraní Ethernet pro přímé spojení s řídicím
počítačem. Protože počítač pak s kamerami komunikuje protokolem
TCP/IP, je možné do cesty vložit např. WiFi most nebo jiné síťové
zařízení.
Tip: USB standard nedovoluje použití USB kabelů delších než
asi 5 metrů a USB 3.0 kabely jsou ještě kratší, aby bylo možné
dosáhnout velmi vysoké přenosové rychlosti. Na druhé straně
komunikační protokol TCP/IP, použitý ke spojení s kamerou přes síť
Ethernet, je směrovatelný, tedy vzdálenost mezi kamerou a řídicím
počítačem může být prakticky neomezená. Rychlost stahování je přirozeně podstatně menší, pokud je
kamera připojena přes Ethernet adaptér, zvláště v porovnání s
přímým připojením přes USB 3.
Kamery C1× potřebují k práci
12 V DC
zdroj energie. Síťový adaptér poskytující vhodné napájení je
dodáván s každou kamerou. Kamery C1×
obsahují výkoné chlazení CMOS senzoru a také dovolují ovládat
filtrové kolo, jejich nároky na energii jsou tedy vyšší než
poskytuje USB připojení. Na druhé straně separátní zdroj eliminuje
problémy s poklesem napětí na dlouhých USB kabelech, případně s
životností baterií v přenosných počítačích atd.
Poznamenejme, že kamera musí být připojena k nějakému optickému
systému (např. k dalekohledu), aby mohla vracet snímky. Kamera
dokáže exponovat dlouhou dobu, nezbytnou k zachycení velmi slabých
objektů. Pokud má být kamera používána s dalekohledem, musí být
celá sestava dalekohledu a montáže schopná plynule sledovat objekt
po obloze během dlouhých expozic.
Tělo kamer C1× je navrženo, aby
bylo tak malé a kompaktní, jak jen může chlazená kamera s velkými
senzory být, a současně aby bylo robustní a odolné.
Kamery C1× jsou vybaveny
nastavitelným adaptérem pro dalekohled nebo objektiv a také
závitovými otvory např. pro uchycení na stativ nebo montáž. Jsou
také kompatibilní s externími filtrovými koly pro větší kamery C2
a C3 — hlava kamery C1× obsahuje konektor pro ovládání kola. Pokud je
použito externí filtrové kolo, nastavovací mechanismus na hlavě
kamery není dostupný a na místo toho se využívá nastavovací
mechanismus na filtrovém kole. S externími koly jsou kamera
C1× dále kompatibilní s celou řadou
další adaptérů pro různé standardy a také adaptéry pro mimo-osou
pointaci atd.

Hlava kamery C1× Hlava kamery C1× je navržena aby
ji bylo možné snadno zkombinovat s řadou příslušenství, splňující
nejrůznější požadavky při pozorování. Vzdálenost ohniskové roviny
(BFD — Back Focal Distance) od základny
adaptérů na hlavě kamery je 16,5 mm. Tato základna pro další adaptéry, vybavená
závitem M56 × 1, může být přímo
použita k uchycení kamery k dalekohledu.
Závit M56 × 1 na základně
adaptérů je používán k uchycení adaptérů pro další
standardy:
Závitový adaptér M42 × 0,75 (T-závit) s
55 mm BFD. Závitový adaptér M48 × 0,75 s 55 mm BFD. Adaptér pro objektivy s bajonetem Canon EOS. Adaptér pro objektivy s bajonetem Nikon.
Kamera C1× s adaptérem
M48, Nikon a Canon (vlevo), a s objektivem Canon EOS na
bajonetovém adaptéru (vpravo) Základna adaptérů je vybavena čtyřmi závitovými otvory M3 ve
vzdálenosti 44 mm. Protože BFD
základny adaptérů je 16,5 mm — stejně jako je tomu
u kamer C2 a C3 — je možné ke kameře
C1× připojit externí filtrová kola.
K dispozici jsou čtyři velikosti filtrových kole, lišící se
velikostí i počtem filtrů:
Extra malé „XS“ (eXtra Small) kolo
pro:
Malá „S“ (Small) kolo pro:
5 čtvercových filtrů 50 × 50 mm 7 filtrů D50 mm bez objímek nebo ve 2” závitových
objímkách 10 filtrů D36 mm bez objímek
Střední „M“ (Medium) kolo pro:
5 čtvercových filtrů 50 × 50 mm 7 filtrů D50 mm bez objímek nebo ve 2” závitových
objímkách 10 filtrů D36 mm bez objímek
Velké „L“ (Large) kolo pro:
Kamery C1× s externími
filtrovými koly velikosti „XS“ a „S“ Pokud je připojeno externí filtrové kolo, mechanismus
seřizování kolmosti optické osy na kameře není dostupný. Na místo
toho je využíván alternativní mechanismus nastavování kolmosti
optické osy, vyrobený na čelním plášti filtrových kol pro adaptéry
kompatibilní s kamerami C3. Pokud je tedy používáno filtrové kolo,
nelze použít adaptéry určené pro závit M56 × 1, a je nutno používat adaptéry pro kamery
C3.
Existují dvě velikosti seřiditelných adaptérů
dalekohledu v závislosti na velikosti filtrového kola:
Extra malá „XS“ a malá „S“ filtrová kola
používají malé „S“ adaptéry, kompatibilní s kamerami C2.
V této velikosti existují např. adaptéry pro závity
M48 × 0,75 a
M42 × 0,75, Canon
EOS a Nikon bajonet, okulárový 2” adaptér apod. Střední „M“ a velká „L“ filtrová kola
používají velké „L“ adaptéry, kompatibilní s kamerami C4,
určené pro adaptéry o velkém průměru, například závitový adaptér
M68 × 1 nebo G3-OAG, který je také
vybaven závitem M68 × 1.
Systém kamer C1×

Schema systému kamer C1×
se seřiditelným adaptérem M56 × 1 
Schema systému kamer C1×
s malými „S“ adaptéry 
Schema systému kamer C1×
s velkými „L“ adaptéry Komponenty systému kamer C× zahrnují:
Kamera C1× se seřiditelným
adaptérem M56 × 1 Volitelný modul GPS přijímače Pointační kamera C0 Pointační kamera C1 Moravian Camera Ethernet Adapter (x86 CPU) Moravian Camera Ethernet Adapter (ARM
CPU) Off-Axis Guider adaptér pro základny velikosti „S“
se závitem M48 × 0,75 a vzdáleností ohniska
55 mm Off-Axis Guider adaptér pro základny velikosti „L“
se závitem M68 × 1 a vzdáleností
ohniska 61,5 mm Krátký závitový adaptér M42 × 0,75 (T-závit) s
21,5 mm
BFD Dlouhý závitový adaptér M42 × 0,75 (T-závit) s
55 mm BFD Krátký závitový adaptér M48 × 0,75 s
21,5 mm
BFD Dlouhý závitový adaptér M48 × 0,75 s 55 mm BFD Závitový adaptér M42 × 0,75 (T-závit) nebo
M48 × 0,75
velikosti „S“ se vzdáleností ohniska 55 mm Závitový adaptér M68 × 1
velikosti „L“ se vzdáleností ohniska
47,5 mm Bajonetový adaptér objektivů Canon EOS pro závit
M56 Bajonetový adaptér objektivů Canon EOS velikosti
„S“ Bajonetový adaptér objektivů Canon EOS velikosti
„L“ Bajonetový adaptér objektivů Nikon pro závit M56 Bajonetový adaptér objektivů Nikon velikosti
„S“ Externí filtrové kolo velikosti „XS“ (7 pozic) Filtrové kolo se 7 pozicemi pro D36 mm filtry pro pláště
velikosti „XS“ Externí filtrové kolo velikosti „S“ (5, 7 nebo 10
pozic) Filtrové kolo s 10 pozicemi pro D36 mm filtry pro pláště
velikosti „S“ Filtrové kolo se 7 pozicemi pro 2”/D50 mm filtry pro
pláště velikosti „S“ Filtrové kolo s 5 pozicemi pro 50 × 50 mm filtry pro pláště velikosti
„S“ Externí filtrové kolo velikosti „M“ (5, 7 nebo 10
pozic) Filtrové kolo s 10 pozicemi pro D36 mm filtry pro pláště
velikosti „M“ Filtrové kolo se 7 pozicemi pro 2”/D50 mm filtry pro
pláště velikosti „M“ Filtrové kolo s 5 pozicemi pro 50 × 50 mm filtry pro pláště velikosti
„M“ Externí filtrové kolo velikosti „L“ (7 nebo 9
pozic) Filtrové kolo s 9 pozicemi pro 2”/D50 mm filtry pro
pláště velikosti „L“ Filtrové kolo se 7 pozicemi pro 50 × 50 mm filtry pro pláště velikosti
„L“
CMOS senzory a elektronika kamery
Kamery C1× jsou vybaveny
zezadu osvětlovanými CMOS senzory Sony IMX s rolující
závěrkou a pixely velkými 3,76 × 3,76 μm. Přes relativně malé rozměry pixelu, jejich plná
kapacita přesahuje 50 ke-, což je více než kapacita pixelů typická
i pro CMOS senzory s mnohem většími pixely a dokonce převyšuje i
kapacitu srovnatelně velkých pixelů CCD snímačů.
Použité Sony senzory obsahují plně 16-bitový ADC
(analogově/digitální převodník). 16-bitová digitalizace zajišťuje
dostatečně velké rozlišení k pokrytí celého výjimečně velkého
dynamického rozsahu senzoru.
Oba senzory IMX571 (použitý v C1×26000) i IMX455 (použitý v C1×61000) jsou dodávány ve dvou
třídách:
Spotřebitelská třída. Výrobce senzorů (Sony
Semiconductor Solutions Corporation) omezuje použití těchto
senzorů na „konzumní“ (ne-profesionální) fotografické
kamery s maximálním dobou běhu 300 hodin za rok. Průmyslové třída, určená pro použití v
profesionálních produktech s intenzivním nebo i nepřetržitým
provozem 24/7.
Všechny charakteristiky senzorů (rozlišení, dynamický
rozsah, …) jsou stejné, senzory se odlišují jen cílovou aplikací
a dobou provozu. C1× je technicky
„fotografická kamera“, pouze specializovaná na
astronomii. Je-li také „spotřebitelská“ nebo
„profesionální“ už záleží na uživateli. Kamery používané
k příležitostnému snímání (když počasí dovolí) jen výjimečně
překročí 300 hodin pozorování za rok. Kamery permanentně
instalované na hvězdárnách, využívající každou jasnou noc k
pozorování a případně umístěné v místech s velkým počtem jasných
nocí překročí limit 300 hodin za rok během pár měsíců. Proto
jsou kamery C1× nabízeny ve dvou
variantách:
C1×26000 a
C1×61000 se
„spotřebitelskými“ senzory, určenými k provozu max.
300 hodin ročně. C1×26000 PRO a
C1×61000 PRO s
průmyslovou třídou senzorů.
Kamery C1× se spotřebitelskými
senzory:
| Model |
C1×26000 |
C1×61000 |
C1×26000C |
C1×61000C |
| CMOS senzor |
IMX571 |
IMX455 |
IMX571 |
IMX455 |
| Třída senzoru |
Consumer |
Consumer |
Consumer |
Consumer |
| Barevná maska |
None |
None |
Bayer RGBG |
Bayer RGBG |
| Rozlišení |
6252 × 4176 |
9576 × 6388 |
6252 × 4176 |
9576 × 6388 |
| Velikost pixelu |
3,76 × 3,76 μm |
3,76 × 3,76 μm |
3,76 × 3,76 μm |
3,76 × 3,76 μm |
| Plocha senzoru |
23,51 × 15,70 mm |
36,01 × 24,02 mm |
23,51 × 15,70 mm |
36,01 × 24,02 mm |
Kamery C1× s průmyslovými
senzory:
| Model |
C1×26000 PRO |
C1×61000 PRO |
C1×26000C
PRO |
C1×61000C
PRO |
| CMOS senzor |
IMX571 |
IMX455 |
IMX571 |
IMX455 |
| Třída senzoru |
Industrial |
Industrial |
Industrial |
Industrial |
| Barevná maska |
None |
None |
Bayer RGBG |
Bayer RGBG |
| Rozlišení |
6252 × 4176 |
9576 × 6388 |
6252 × 4176 |
9576 × 6388 |
| Velikost pixelu |
3,76 × 3,76 μm |
3,76 × 3,76 μm |
3,76 × 3,76 μm |
3,76 × 3,76 μm |
| Plocha senzoru |
23,51 × 15,70 mm |
36,01 × 24,02 mm |
23,51 × 15,70 mm |
36,01 × 24,02 mm |
Elektronika kamery
Hlavní role elektroniky CMOS kamery, mimo inicializace a
ovládání některých pomocných funkcí, je přenos dat z CMOS
detektoru do řídicího PC ke zpracování a ukládání. Na rozdíl
od kamer s CCD detektory, návrh kamery s CMOS čipy nedokáže
ovlivnit řadu důležitých parametrů, jako např. dynamický
rozsah (počet bitů na pixel).
Linearita senzoru
Odezva senzorů, použitých v kamerách C1×, na světlo je velmi lineární. To znamená,
že kamera může být použita i pro náročné výzkumné projekty,
jako je např. fotometrie jasných proměnných hvězd apod.

Odezva senzoru IMX455 v 16 bitovém módu Rychlost stahování
Kamery C1× jsou vybaveny
pamětí RAM, schopnou pojmout několik snímků v plném rozlišení.
Stahování snímku do řídicího počítače je tak zcela nezávislé
na procesu digitalizace, protože stahování pouze přenáší již
digitalizovaný obraz z paměti kamery.
Čas potřebný ke stažení celého snímku závisí na použitém
čtecím módu a také zda je použito rychlé rozhraní USB3 nebo
pomalejší USB2:
| Model |
C1×26000 |
C1×61000 |
| Celý snímek, USB 3.0 (5 Gbps) |
0,20 s |
0,47 s |
| Celý snímek, USB 2.0 (480 Mbps) |
1,16 s |
2,74 s |
Pokud je čten pouze výřez snímku, čas digitalizace a
stažení klesá. Rychlost ale není přímo úměrná počtu pixelů
vzhledem k určité fixní režii, nezávislé na velikosti čtené
oblasti.
| Model |
C1×26000 |
C1×61000 |
| Podrámec 1024 × 1024, USB 3.0 (5 Gbps) |
0,03 s |
0,04 s |
| Podrámec 1024 × 1024, USB 2.0 (480 Mbps) |
0,05 s |
0,05 s |
Upozornění: Uvedené časy stažení platí pro kamery s firmware
verze 2.3 a novější. Časy stažení se starším firmware jsou asi
o 30% delší. Ovladač je někdy nucen přečíst větší část
senzoru vzhledem k omezením kladeným senzorem na rozměry a
pozice pod-rámců. Někdy může být dokonce nezbytné přečíst celý
senzor. Tip: Doporučujeme kliknout na tlačítko Adjust
Frame v záložce Frame nástroje pro ovládání
kamery programu SIPS. Rozměry a pozice zvoleného rámce jsou
pak upraveny tak, aby vyhovovaly limitům daným senzorem.
Upravený pod-rámec je pak možno přečíst bez nutnosti stahovat
větší část obrazu nebo dokonce celý snímek a poté jej ořezávat
ve firmware. Rychlost stahování snímků přes Moravian Camera Ethernet
Adapter závisí jestli je použit 100 Mbps nebo 1 Gbps Ethernet,
jestli je kamera k zařízení Ethernet Adapter připojena přes
USB 2 nebo USB 3 a také je ovlivňována vytížením Ethernet
linky atd. Při použití přímé 1 Gbps Ethernet linky a USB 3 je
doba stažení snímku z kamery C1×61000 asi 2,5 s.
Zisk kamery
Senzory použité v kamerách C1× nabízí programovatelné zesílení 0 do
36 dB, což znamená násobení výstupního signálu 1× až 63×.
Ovladač kamery akceptuje zesílení v rozsahu 0 až 4030, což
odpovídá přímo hodnotám registrů senzoru. Toto číslo ale
nereprezentuje zesílení ani v dB ani nevyjadřuje přímo
násobek. Nicméně ovladač kamery nabízí funkci, která toto
číslo převede současně na zesílení v dB a také na násobek
zesílení. Některé vybrané hodnoty jsou v následující
tabulce:
| Číslo zesílení |
Zesílení v dB |
Násobek zesílení |
| 0 |
0,00 |
1,00× |
| 1000 |
2,34 |
1,32× |
| 2000 |
5,82 |
1,95× |
| 3000 |
11,46 |
3,74× |
| 4000 |
32,69 |
43,11× |
| 4030 |
35,99 |
63,00× |
Převodový poměr a čtecí šum
Obecně řada vlastností senzoru závisí na zesílení. Použité
senzory také obsahují dvě digitalizační cesty. Jedna cesta
nabízí velice nízký čtecí šum, ale nedokáže využít plný
dynamický rozsah pixelů. Další digitalizační cesta je schopná
zužitkovat plnou kapacitu pixelu, ale za cenu mírně vyššího
čtecího šumu. Zlomový bod nastává při zesílené 3× (asi 10 dB),
kde kapacita pixelu klesne z více jak 50 ke- na ~17 ke-. Čtecí šum poté klesne z
~3,2 e- RMS na
~1,5 e- RMS.
| Číslo zesílení |
Zesílení dB |
Zesílení násobek |
Převodový poměr |
Čtecí šum RMS |
Plná kapacita pixelu |
| 0 |
0,0 dB |
1× |
0,80 e-/ADU |
3,51 e- |
52 800 e- |
| 2749 |
9,7 dB |
3× |
0,26 e-/ADU |
3,15 e- |
17 000 e- |
| 2750 |
9,7 dB |
3× |
0,26 e-/ADU |
1,46 e- |
17 000 e- |
| 4030 |
36,0 dB |
63× |
0,012 e-/ADU |
1,28 e- |
800 e- |
Dynamický rozsah senzoru, definovaný jako poměr
mezi plnou kapacitou pixelu a čtecím šumem, je největší při
použití zesílení 0, i když je čtecí šum mírně
větší:
Při zesílení 0 je dynamický rozsah
52 800 / 3,51 = 15 043× Při zesílení 2750 je dynamický rozsah
17 000 / 1,46 = 11 644×
Také stojí za zmínku, že v reálných situacích není spodní
hladina šumu vždy definována čtecím šumem. Pokud kamera není
používána s velmi úzkým úzko-pásmovým filtrem (s FWHM jen
několik nm) a pod velmi tmavou oblohou, dominantní zdroj šumu
bývá jas oblohy. Pokud šum způsobený jasem oblohy přesáhne asi
4 e- RMS, extrémně nízký čtecí
šum, spojený s použitím zesílení 2750 a více, není využit a
dynamický rozsah je zbytečně omezen omezenou kapacitou
pixelu.
Jaké zesílení je tedy nejlépe použít? To záleží na
konkrétní aplikaci.
Zesílení nastavené na 2750 může být použito při
snímání přes úzko-pásmové filtry s přiměřeně krátkými
expozicemi, aby šum generovaný jasem oblohy nepřesáhl čtecí
šum. To je typické pro estetickou astro-fotografii, kde
menší kapacity pixelu neomezuje kvalitu výsledných
snímků. Ale i bez úzko-pásmových filtrů dovoluje
extrémně nízký čtecí šum sčítat větší množství kratších
expozic, aniž by šum pozadí výsledných snímků neúměrně rostl
díky akumulaci vysokého čtecího šumu jednotlivých
snímků. Zesílení 0 nabízí nejvyšší dynamický rozsah senzoru,
což bývá důležité zejména ve výzkumných aplikacích. Pásma
propustnosti filtrů používaných ve fotometrii jsou relativně
široká a dominantním zdrojem šumu je jas oblohy. Ale
také při snímání přes RGB filtry při pořizování estetických
astro-fotografií může vyšší dynamický rozsah dovolovat
použití delších expozic, aniž by docházelo k saturaci
jasných částí snímaných galaxií nebo mlhovin, což zabraňuje
jejich dalším zpracování.
Binning
Ovladač kamery a uživatelské aplikace nabízejí velké
množství kombinací módů binningu až do 4 × 4 pixelů, stejně jako asymetrické módy
binningu 1 × 2, 1 × 3, 1 × 4,
2 × 4 atd. Aby byla umožněna
taková flexibilita, binning je prováděn v ovladači kamery
(programový binning) a nespoléhá na omezené možnosti hardware
senzoru.
Nevýhoda programového binningu je stejný čas stažení snímku
jako je tomu u plného rozlišení v módu 1 × 1. Pro typické použitá v astronomii, malý
zlomek sekundy navíc k času stažení je irelevantní, ale pro
aplikace citlivé na dobu stažení může být 2 × 2 binning v hardware kamery užitečný.
Binning v hardware
Kamery C1× implementují
kromě plného rozlišení (binning 1 × 1) ve svém hardware také 2 × 2 binning.
Upozornění: Binning v kameře je podporován od firmware
kamery verze 3.3 a novějších. Windows SDK podporuje
binning v kameře od veze 4.11 a programový balík SIPS
počínaje verzí 3.33. Binning v kameře může být zapnut parametrem
HWBinning v konfiguračním souboru
'cXusb.ini', který je umístěn ve stejném
adresáři jako je samotná DLL ovladače
'cXusb.dll'.
[driver]
HWBinning = true
Pokud je parametr HWBinning nastaven
na true, používá se binning v hardware kamery. Tento mód
přináší rychlejší stahování, ale také zavádí několik
omezení:
Maximální binning je omeze na 2 × 2, vyšší módy binningu nejsou k
dispozici. Asymetrické módy binningu (1 × 2, 2 × 1, ...) nejsou
podporovány.
Sčítání nebo průměrování pixelů
Tradiční význam anglického „pixel binning“
znamená sčítání sousedních pixelů. To pochází od CCD
senzorů, kde byl náboj v jednotlivých pixelech doslova
sléván dohromady v horizontálním registru nebo ve
výstupním uzlu snímače.
Pro CMOS senzory s plně 16-bitovým převodem by takové
sčítání hodnot pixelů znamenalo omezení dynamického
rozsahu; např. pouze 1/4 maximální kapacity v každém z
2 × 2 sčítaných pixelů by
vedlo na saturování výsledného pixelu. CCD do určité míry
eliminovány tento problém zvětšováním nábojové kapacity
horizontálního registru a výstupního uzlu a také
snižováním zisku kamery, pokud byl použit binning. Ale u
CMOS senzorů tato opatření nepřipadají do úvahy.
Teoreticky je výsledný poměr signál/šum (S/N)
binnovaného pixelu stejný bez ohledu na to, jestli jsou
pixely sčítány nebo průměrovány. Uvažme příklad binningu
2 × 2:
Pokud sečteme 4 pixely, signál se zvětší
4× a šum se zvětší
2× — tři aditivní operace zvětší šum
√((√2)^2+(√2)^2 ). Výsledný S/N je
2× větší, ale pouze pokud
součet všech pixelů nepřeteče kapacity výsledného
pixelu. Pokud zprůměrujeme 4 pixely, signál zůstane
stejný, ale šum se zmenší na 1/2, protože i šum je
průměrován √((√2)^2+(√2)^2 )/4.
Výsledný S/N je opět 2×
větší, ale pouze pokud šum neklesne pod teoretické
minimum 1 bitu dynamického
rozlišení.
Protože čtecí šum kamery C1× při maximálním dynamickém rozlišení
(zisk 0) je asi 3,5 ADU, i po snížení na
polovinu při 2 × 2 binningu
stále zůstává nad 1-bitovou hranicí a současně binnované
pixely nebudou saturovat. Pro vyšší módy binningu už můře
šum dosáhnout dolního limitu, ale průměrování pixelů stále
chrání před saturací, což je mnohem významnější než
případné snížená poměru S/N.
Pokud vezmeme v úvahu, že šum pozadí snímku je jen
výjimečně určen čtecím šumem, protože šum způsobený jasem
oblohy je typicky mnohem větší, je průměrování pixelů při
binningu pro 16-bitovou kameru nepochybně lepší způsob
binnování. Z tohoto důvodu u kamer C1× programový binning (v ovladači) i
hardware binning (v kameře) standardně průměruje pixely na
místo aby je pouze sčítal.
Nicméně, programový i hardware binning může být přepnut
na sčítání pixelů parametrem BinningSum v
konfiguračním souboru ovladače 'cXusb.ini':
[driver]
BinningSum = true
Poznamenejme, že existuje ještě jedna možnost binnování
pixelů — v aplikačním programu. V
tomto případě není binning prováděn ani v hardware kamery,
ani v jejím ovladači. Snímek s plným rozlišením je stažen
a až aplikační program provede programový binning.
Programový balík SIPS pixely při binningu sčítá a nikoliv
průměruje, ale současně při tom převádí snímky z
16-bitového na 32-bitové rozlišení. To znamená, že S/N
binnovaných snímků vždy roste, pixely nikdy nesaturují a
současně čtecí šum nemůže dosáhnout dolního limitu.
Nevýhodou tohoto způsobu je dvojnásobná délka výsledných
snímků.
Binning ve fotometrii
Saturované pixely v obrazu jasných hvězd nepředstavují
problém pro estetickou astro-fotografii, ale fotometrické
měření je zcela neplatné pokud libovolný pixel v ploše
měřeného objektu dosáhl maximální hodnoty, protože pak
není možné učit kolik světelného toku bylo ztraceno.
Programy zpracovávající fotometrii (např. nástroj
Fotometrie programu SIPS) by měly saturované pixely
detekovat a dané fotometrické měření označit za neplatné,
aby se do světelné křivky nezaváděly chybné body.
Ale během binnování (ať už sčítáním nebo průměrováním)
je informace o tom, že nějaký pixel dosáhl saturační
úrovně, ztracena (s výjimkou kdy všechny binnované pixely
jsou saturovány). Použití binningu ve výzkumných
aplikacích (fotometrie a astrometrie) tedy může vést k
chybám, způsobeným ztraceným světelným tokem u
saturovaných pixelů, který ale není detekován programy
provádějícími zpracování.
Z tohoto důvodu je chování programového i hardware
binningu u kamer C1×
konfigurovatelné dalším parametrem
BinningSaturate konfiguračního souboru ovladače
'cXusb.ini':
[driver]
BinningSaturate = true
Pokud je parametr BinningSaturate nastaven na
true, výsledný binnovaný pixel je saturován, pokud je
saturován libovolný zdrojový pixel. Pro estetickou
astro-fotografii může tento parametr zůstat na hodnotě
false, což může vést k mírně lepšímu prokreslení jasných
hvězd. Ale u vědeckých aplikací by tento parametr vždy měl
být true.
Oba parametry BinningSum a
BinningSaturate mají efekt jen pokud je v kameře
firmware verze 5.5 a vyšší. Předchozí verze firmware
používaly průměrování pixelů, ale saturace pixelů nebyla
brána do úvahy (jako by byl parametr
BinningSaturate nastaven na false), pokud byl
použit hardware binning (v kameře).
Dřívější verze ovladačů kamery, provádějící programový
binning, také průměrovaly pixely, ale saturované pixely
zpracovávaly jako by byl parametr BinningSaturate
nastaven na true.
Oba výše zmíněné parametry vyžadují
programy/ovladače alespoň těchto verzí:
SIPS verze 3.33 Moravian Camera SDK verze 4.11 ASCOM ovladače verze 5.13 Linux INDI ovladače verze 1.9-2 Linux knihovny verze 0.7.1 macOS knihovny verze 0.6.1 TheSkyX Windows/Linux/macOS verze 3.4 AstroArt ovladače verze 4.3
Pokud je kamera používána přes Moravian Camera Ethernet
Adapter, firmware v adaptéru musí být verze 53 nebo
novější.
Ovládání expozice
Nejkratší teoretický expoziční čas kamer
C1× záleží na použitém
senzoru:
Nicméně takto krátké expozice nemají moc praktických
uplatnění, zvláště pak v astronomii. Firmware kamer
zaokrouhluje expoziční čas na násobek 100 μs intervalů, tedy ve
skutečnosti je nejkratší expoziční čas obou kamer
200 μs.
Pro maximální délku expozice neexistuje žádný limit. Ve
skutečnosti je nejdelší expozice omezena saturací senzoru buď
dopadajícím světlem nebo temným proudem (viz. následující
podkapitola).
Upozornění: Ke správnému fungování velmi krátkých expozičních
časů ne nutné, aby kamera používala firmware verze 6.7 nebo
novější. GPS časové značky expozic
Kamery C1× ve verzi
„T“ mohou být vybaveny modulem GPS přijímače (Viz
kapitola Volitelné příslušenství). Primární účel GPS
přijímače je poskytovat vysoce přesný čas počátků expozic,
což je vyžadováno aplikacemi zjišťování polohy rychle se
pohybujících objektů (planetky, umělé družice, kosmické
smetí na orbitě kolem Země, …).
GPS modul potřebuje zachytit signály alespoň 5 GPS
družic, aby mohl poskytovat přesné časové údaje.
Geografická poloha je k dispozici už od 3 zachycených
satelitů, ale zejména přesnost nadmořské výšky je malá
pokud nejsou zachyceny alespoň 4 družice.
SDK kamery nabízí funkce, které uživatelům dovolují
přečíst přesný okamžik expozice a také geografickou
polohu. Nástroj pro obsluhu hlavní kamery v programu SIPS
obsahuje záložku „GPS“, která ukazuje status GPS
přijímače.
Určení přesného času začátku expozice není
vzhledem k rolující elektronické závěrce použitých
senzorů úplně jednoduché. Ovladač kamery provede většinu
výpočtů interně a vrátí okamžik začátku expozice prvního
řádku obrazu. Uživatelé ale musí dále provést několik
korekcí:
Jednotlivé řádky jsou exponovány postupně. Časový
rozdíl mezi dvěma následujícími řádky se liší podle typu
senzoru:
Jeden řádek C1×26000 trvá
34,667 μs Jeden řádek C1×61000 trvá
39,028 μs Pokud je snímek binován, jeden řádek výsledného
snímku vznikne složením více řádků originálního snímku s
různými okamžiky začátku expozice. Rozdíl v okamžicích
expozice řádků výsledného snímku odpovídá času jednoho
řádku, vynásobeného svislou velikostí binningu (počtem
kombinovaných řádků). Pokud je čten pouze podrámec, je nutné vzít do
úvahy fakt, že senzor má řadu omezení na fyzickou
velikost podrámce. Pokud požadovaný podrámec nevyhovuje
omezením daným senzorem, ovladač kamera podrámec zvětší
tak, by obsahoval celý požadovaný podrámec a současně
vyhovoval omezením senzoru. Poté podrámec ještě ořízne
programově. Okamžik startu expozice pak odpovídá prvnímu
řádku skutečně čteného podrámce, nikoliv času prvního
řádku výsledného obrazu, který mohl být programově
oříznut. Například souřadnice y podrámce nesmí být
menší než 25 řádků. Pokud je požadován podrámec
začínající na řádku menším než 25, je přečten celý
snímek a až poté je programově oříznut. Poznamenejme, že
SDK kamer nabízí funkci AdjustSubFrame, která
vrátí nejmenší podrámec, obsahující požadovaný podrámec
a vyhovující omezením čipu. Pokud je čten upravený
podrámec, k žádnému programovému ořezávání nedochází čas
expozice snímku odpovídá prvnímu řádku obrazu. Program
SIPS nabízí tlačítko „Adjust Frame“, které
stejným způsobem upraví zvolený podrámec.
Upozornění: Upozorňujeme, že precizní časování expozic
pracuje od firmware verze 7.10 a vyšší. Vždy používejte poslední ovladače kamery (ASCOM nebo
DLL knihovny z SDK ve Windows, INDI nebo knihovny v Linuxu
atd.), které jsou k dispozici ke stažení. Stejně tak
aktualizujte firmware v Moravian Camera Ethernet Adapter,
pokud je kamera připojená přes Ethernet.
Vstup spouště expozic
Kamery C1× označené
příponou „T“ (Tedy kamery současně kompatibilní s
GPS přijímačem) jsou vybaveny vstupem pro vnější ovládání
začátků expozic.
Vstup spouště expozic dovoluje externím zařízením určit
přesný okamžik začátků expozic.
Vstup pro spouštění expozic je k dispozici na zadní
straně pláště kamery C1×.
Vstup spouště používá konektor RJ9 (4P4C) se čtyřmi
piny. Piny 1 a 2 jsou propojeny a mají funkci kladného
pólu, piny 3 a 4 jsou spojeny s negativním pólem. Spoušť
je aktivována, pokud vnější zařízená propojí (zkratuje)
piny 1 nebo 2 s pinem 3 nebo 4. Vstup spouště je
galvanicky izolován od celého zbytku kamery, tedy od země
napájení a USB atd.
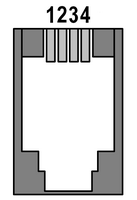 |
| 1 |
Pozitivní (+) pin č. 1 |
| 2 |
Pozitivní (+) pin č. 2 |
| 3 |
Negativní (-) pin č. 1 |
| 4 |
Negativní (-) pin č. 2 |
|
Maximální proud, spotřebovávaný zkratovaným vstupem
spouštěče expozic, nepřesahuje 1 mA.
Chlazení a napájecí zdroj
Regulované termoelektrické chlazení je schopné ochladit CMOS
senzor asi o 35 °C pod okolní teplotu, v závislosti na typu
kamery. Horká strana Peltiérova článku je chlazena ventilátorem.
Teplota senzoru je regulována s přesností +/-0,1 °C. Vysoký rozdíl teplot a přesná regulace
zajišťují velmi nízký temný proud pro dlouhé expoziční časy a
současně dovoluje správkou kalibraci snímků.
, výstup vzduchu pak na horní straně (vpravo)")
Vstup vzduchu chladicího ventilátoru kamer C1× je na spodní straně kamery (vlevo), výstup
vzduchu pak na horní straně (vpravo) Efektivita chlazení závisí na okolních podmínkách a také na
napájejí kamery. Pokud napájecí napětí klesne pod 12 V, maximální rozdíl teplot se také sníží.
| Chlazení senzoru |
Termoelektrické (Peltiérovy) články |
| Chlazení ΔT |
~30 °C pod okolí |
| Přesnost regulace |
0,1 °C |
| Chlazení horké strany |
Nucený oběh vzduchu (ventilátor) |
Specifikace chlazení senzoru 
Kamera C1×61000 dosahuje
ochlazení senzoru -35 °C pod okolní
teplotou Ochrana proti přehřátí
Součástí firmware kamer C1×
je ochrana proti přehřátí. Tato ochrana je navržena tak, aby
teplota horké strany Peltiérových termoelektrických modulů
nepřesáhla asi 50°C — chlazení senzoru
je v takovém případě vypnuto aby Peltiérovy moduly přestaly
generovat na své horké straně teplo.
Aktivace ochrany proti přehřátí způsobí snížení chladicího
výkonu, pokles vnitřní teploty kamery a zvýšení teploty
senzoru. Jakmile teplota v kameře klesne pod daný limit,
chlazení je opět zapojeno. Pokud je teplota okolí stále
vysoká, vnitřní teplota kamery opět vzroste a ochrana proti
přehřátí se opět aktivuje.
Napájecí zdroj
Napájení 12 V DC dovoluje kameře pracovat z jakéhokoliv
(i nestabilizovaného) zdroje včetně baterií, síťových adaptérů
apod. S kamerou je dodáván univerzální 100–240 V AC/50–60 Hz, adaptér
o výkonu 60 W.
| Napájení hlavy kamery |
12 V DC |
| Spotřeba kamery |
<6 W bez
chlazení |
| |
34 W chlazení 100% |
| Napájecí konektor |
5,5/2,5 mm, + uprostřed |
| Vstupní napětí adaptéru |
100-240 V AC/50-60 Hz |
| Výstupní napětí adaptéru |
12 V DC/5 A |
| Maximální výkon adaptéru |
60 W |
Specifikace napájecího zdroje Upozornění: Napájecí konektor na hlavě kamer má plus pól na
středovém kolíku. Ačkoliv všechny moderní zdroje používají
tuto konfiguraci, vždy se přesvědčte, že použité napájení má
správnou polaritu. 
Napájecí zdroj 12 V DC/5 A pro
kameru C1× Mechanické specifikace
Kompaktní a robustní hlava kamery měří pouze 78 × 78 × 108 mm.
Hlava je vyrobena z kvalitního duralu CNC obráběním a černě
eloxována. Hlava obsahuje USB-B konektor, konektor pro ovládání
externího filtrového kola napájecí konektor 12 V DC.
Přední strana kamery C1× není
určena přímo pro uchycení adaptéru pro dalekohled nebo objektiv.
Na místo něj je vyrobena pro seřiditelnou základnu, na kterou jsou
teprve montovány vlastní adaptéry pro dalekohled.

Závit M56 × 1 a čtyři
závitové otvory M3 tvoří rozhraní pro dalekohledy nebo objektivy
kamer C1×
| Velikost hlavy |
79 mm × 78 mm × 108 mm |
| Vzdálenost ohniskové roviny |
16,5 mm
(základna adaptérů se závitem M56 × 1) |
| Hmotnost hlavy kamery |
0,85 kg |
Mechanické specifikace Hlava kamery C1×

Čelní pohled na hlavu kamery C1× se seřiditelným adaptérem s vnitřním
závitem M56 × 1 a čtyřmi závity
M3 
Boční pohled na hlavu kamery C1× 
Hlava kamery C1× se
závitovým adaptérem M42 × 0,75 nebo
M48 × 0,75/2"
s 21,5 mm
BFD 
Hlava kamery C1× se
závitovým adaptérem M42 × 0,75 nebo
M48 × 0,75/2"
s 55 mm BFD 
Hlava kamery C1× s
adaptérem Canon EOS pro fotografické objektivy 
Hlava kamery C1× s
adaptérem Nikon pro fotografické objektivy Kamera C1× s externím
filtrovým kolem velikosti „XS“

Boční pohled na kameru C1× s externím filtrovým kolem 
Spodní pohled na kameru C1× s externím filtrovým kolem Externí filtrová kola velikosti „S“, „M“ a
„L“ mají větší průměr (viz. Externí filtrová kola), vzdálenosti čelní
roviny od senzoru jsou ale u všech externích kol
identické.
Tip: Adaptéry M42, M48, Canon a Nikon, určené pro závit
M56 × 1, nemohou být použity s
externími filtrovými koly. Nicméně každé externí filtrové kolo
je vybaveno základnou adaptérů pro kamery C2 a C3 a tak je
možné použít všech adaptérů, určených pro tyto větší kamery,
spolu s kamerou C1× a externím
filtrovým kolem. Volitelné příslušenství
Ke kamerám C1× je nabízena celá
řada příslušenství rozšiřujícího funkce kamery a pomáhajícího
zabudovat kameru do celé pozorovací sestavy.
Adaptéry dalekohledů
Ke kamerám C1× je nabízena
řada adaptérů pro dalekohledy nebo fotografické objektivy.
Uživatel může zvolit jakýkoliv jiný adaptér podle potřeby a
další adaptéry mohou být také objednány separátně.
 a Canon EOS (vpravo)")
Kamera C1× s
adaptérem M48×0,75 (vlevo) a Canon
EOS (vpravo) Existují dva způsoby spojení mezi seřiditelnou
základnou adaptérů na hlavě kamer C1× a konečným adaptérem:
Vnitřní závit M56 × 1 s 16,5 mm BFD.
Adaptéry pro objektivy Canon EOS a Nikon a standardní
závitové adaptéry M42 × 0,75 (T-závit) a
M48 × 0,75 s
55 mm BFD používají toto
spojení s kamerou. Čtyři závitové otvory M3 vzdálené 44 mm. Vzdálenost čelní plochy základny
adaptérů k senzoru je 16,5 mm, což BFD čelní plochy těla kamer C2 a
C3 bez filtrového kola. To dělá kamery C1× kompatibilní s širokou nabídkou
příslušenství, určenou pro kamery C2 a C3, včetně externích
filtrových kol, adaptérů pro mimo-osou pointaci
atd.
, Nikon (uprostřed) a M48 × 0.75 (vpravo)")
Adaptéry Canon (vlevo), Nikon (uprostřed) a
M48 × 0,75
(vpravo) Pokud je k základně adaptérů uchyceno externí filtrové
kolo, adaptéry pro dalekohledy a objektivy se montují na toto
kolo. V takovém případě je možné použít jakýkoliv adaptér,
určený pro kamery C2 nebo C3.
Existují dvě velikosti základy seřiditelných
adaptérů na externích filtrových kole v závislosti na
velikosti kola samotného:
Extra malá „XS“ malá „S“ filtrová kola
jsou určena pro malé „S“ adaptéry (také používané u
kamer C2) Střední „M“ a velká „L“ filtrová kola
jsou určena pro velké „L“ adaptéry (také používané u
kamer C4)
Malé adaptéry velikosti „S“:
2 palcový okulárový adaptér — adaptér pro okulárový výtah s průměrem 2
palce. T-závit krátký — adaptér s vnitřním závitem M42 × 0,75 mm. T-závit s 55 mm
BFD — adaptér s vnitřním závitem
M42 × 0,75 mm, zachovávající
vzdálenost ohniskové roviny 55 mm. M48 × 0,75
krátký — adaptér s vnitřním
závitem M48 × 0,75 mm. M48 × 0,75 s 55 mm
BFD — adaptér s vnitřním závitem
M48 × 0,75 mm, zachovávající
vzdálenost ohniskové roviny 55 mm. Bajonet Canon EOS — standardní adaptér pro bajonet objektivů
Canon EOS (velikost „S“), zachovávající vzdálenost
ohniskové roviny 44 mm. Bajonet Nikon F — standardní adaptér pro bajonet objektivů Nikon
(velikost „S“), zachovávající vzdálenost ohniskové
roviny 46,5 mm.
Velké adaptéry velikosti „L“:
M68 × 1 — adaptér
s vnitřním závitem M68 × 1 a
vzdáleností ohniskové roviny 47,5 mm. Bajonet Canon EOS — standardní adaptér pro bajonet objektivů
Canon EOS (velikost „L“), zachovávající vzdálenost
ohniskové roviny 44 mm. Bajonet Nikon F — standardní adaptér pro bajonet objektivů Nikon
(velikost „L“), zachovávající vzdálenost ohniskové
roviny 46,5 mm.
Všechny adaptéry dalekohledů a objektivů kamer C1× mohou být velmi mírně nakláněny. Tato
vlastnost byla zavedena, aby umožnila kompenzaci možných
nepřesností v seřízení kolmosti senzoru na optickou osu
dalekohledu.
Adaptéry dalekohledů jsou přichyceny pomocí tří tažných
šroubů. Protože je sklon adaptérů nastavitelný, další tři
tlačné šrouby (červíky) jsou zapotřebí k zafixování nastavené
polohy adaptéru po povolení tažných šroubů během
seřizování.
 a seřízení pomocí tažných šroubů")
Seřizování adaptéru — Povolení tlačných červíků (vlevo) a seřízení
pomocí tažných šroubů Vzhledem k tomu, že manipulace s tažnými i tlačnými šrouby
najednou je velmi nepohodlná, naklápěcí mechanismus adaptérů
je vybaven prstencovou pružinou, která tlačí adaptér od těla
kamery. To znamená, že tlačné červíky je možné uvolnit a
pracovat pouze s tažnými šrouby, o odtlačení adaptéru se stará
zmíněná pružina. Pružina je navržena tak, aby dokázala
odtlačit kameru od adaptéru, uchyceného k dalekohledu, bez
ohledu na orientaci kamery.
Až poté, co je adaptér seřízen, je vhodné jemně dotáhnout
tlačné červíky k zafixování adaptéru v dané poloze. To
zajišťuje dlouhodobou stabilitu seřízení.
Pokud je použito externí filtrové kolo, pak seřizovací
šrouby na těle kamery nejsou dosažitelné a nepoužívají se k
nastavení kolmosti senzoru. Na místo toho je využívána
seřiditelná základna adaptérů na filtrovém kole.

Externí filtrová kola jsou navržena se seřiditelnou
základnou adaptérů na své čelní ploše Off-Axis Guider adapter
Adaptér pro mimo-osou pointaci (Off-Axis Guider — OAG) může být použit s kamerami C1× pouze pokud je použito externí filtrové
kolo velikosti „M“ nebo „L“. Pak je C3-OAG se
závitem M68 × 1 uchycen na toto
externí filtrové kolo.
OAG adaptér obsahuje rovinné zrcátko, skloněné o 45° k
optické ose. Toto zrcátko odráží část přicházejícího světla do
portu pro pointační kameru. Zrcátko je umístěno dostatečně
daleko od optické osy, aby neclonilo hlavnímu senzoru kamery.
Optická soustava tedy musí být schopna vytvořit dostatečně
velké zorné pole, aby i na odrazné zrcátko dopadalo dostatek
světla.
C3-OAG je vybaven vnitřním závitem M68 × 1 pro uchycení k dalekohledu. Vzdálenost
ohniskové roviny je 61,5 mm.

Pozice odrazového zrcátka vzhledem k optické
ose Port pro pointační kameru je kompatibilní s kamerami C0 a
C1. Je nezbytné nahradit standardní adaptér
CS/1,25” zkrácenou, 10 mm dlouhou variantou. Protože kamery C1
vyhovují standardu CS-mount, (BFD
12,5 mm),
jakákoliv kamera odpovídající tomuto standardu s 10 mm dlouhým 1,25” adaptérem
by měla správně pracovat a C3-OAG.
Modul GPS přijímače
Varianty kamer C1×
„označených příponou T“ (z anglického „Trigger
Input“) mohou být vybaveny volitelným modulem přijímače
GPS signálu, který dovoluje velmi přesné určování okamžiků
expozic. Údaje o geografické poloze jsou pak také k dipozici
ovládacím programům prostřednictvím specifických příkazů.
Použitý GPS přijímač je kompatibilní se všemi satelitním
navigačními systémy GPS, GLONASS, Galileo a BeiDou.
Modul GPS přijímače může být uchycen na boční stranu hlavy
kamery C1×. Pokud není GPS modul
použitý, port pro jeho připojení zakrývá černá krytka.
Upozornění: Pouze kamery C1× s
příponou „T“ jsou kompatibilní s GPS přijímači. Je tedy
nezbytné zvolit model kompatibilní s GPS během objednání
kamery. Uchycení kamery přímo na montáž
Kamery C1× jsou ve spodní
části hlavy kamery vybaveny standardním „stativovým“
závitem 0.250-20UNC a také čtyřmi otvory s metrickými závity
M4.
Pozice závitových otvorů v dolní části hlavy kamery
C1× (vlevo), 1,75" lišta
standardu Vixen pro uchycení hlavy kamery k
montáži Volitelně je možné k těmto závitům uchytit lichoběžníkovou
lištu (tzv. „rybinu“) o rozměru 1,75 palce (standard
Vixen). Pomocí této lišty lze přímo tělo kamery, např. s
připojeným fotografickým objektivem, uchytit přímo k řadě
astronomických montáží navrhovaných pro tento standard.
Kontejner pohlcovače vlhkosti vyměnitelný bez
nástrojů
Kamery C1× používají stejný
kontejner pro silikagel jako větší kamery C3 a C4 s posíleným
chlazením. Celý kontejner je možné odšroubovat, takže je možné
vyměnit silikagel bez nutnosti sejmout kameru z
dalekohledu.

Celý kontejner pohlcovače vlhkosti může být vysušen
nebo může být jeho obsah po odšroubování perforovaného
vnitřního víčka vysypán a vysušen zvlášť Standardně je s kamerou dodáván kontejner, který
nepřesahuje profil hlavy kamery. Je vybaven štěrbinou pro
nástroj (nebo např. minci), dovolující povolení a opětovné
utažení kontejneru.
Návrh dovoluje použití několika volitelných
variant:
Hermetická zátka se závitem, dovolující zatěsnění
vysušeného silikagelu pokud není kontejner bezprostředně
zašroubován do kamery. Alternativní (poněkud delší) kontejner pro silikagel,
navržená tak, aby jej bylo možno odšroubovat (stejně jako
zašroubovat a dotáhnout) bez použití nástrojů.
Srovnání standardního kontejneru a kontejneru pro
ruční manipulaci (vlevo), volitelná zátka a oba kontejnery
(vpravo) Moravian Camera Ethernet Adapter
Zařízení Moravian Camera Ethernet Adapter dovoluje
připojení až 4 kamer Cx libovolného typu na jedné straně a
1 Gbps Ethernet rozhraní na druhé straně. Tento adaptér tak
dokáže zpřístupnit připojení kamery Cx s použitím
směrovatelného protokolu TCP/IP na prakticky neomezenou
vzdálenost.
Jednotka Moravian Camera Ethernet Adapter (vlevo) a
adaptér se dvěma připojenými kamerami (vpravo) Zařízení Moravian Camera Ethernet Adapter je detailně
popsáno zde.
Podpora software
Vždy používejte poslední verze systémových ovladačů pro Windows
i Linux. Starší verze ovladačů nemusí podporovat nové modely
kamer, případně nové verze existujících řad.
Pokud je kamera ovládána přes Moravian Camera Ethernet
Adapter, vždy se ubezpečte, že firmware v jednotce je
aktualizován na nejnovější verzi.
Také vždy používejte polední verzi programu SIPS, starší verze
nemusí nové kamery správně podporovat. Pokud používáte ovladače
pro programy třetích stran (např. ASCOM nebo INDI), vždy ovladače
aktualizujte na polední verzi, která je k dispozici.
SIPS
Program SIPS (Scientific Image Processing System),
dodávaný spolu s kamerou, dovoluje kompletní ovládání kamer
(expozice, chlazení, výběr filtrů atd.). Také podporuje
automatické sekvence snímání přes různé filtry, s rozdílným
binningem apod. S plnou podporou ASCOM standardu může SIPS
ovládat celou hvězdárnu. Konkrétně montáže dalekohledů, ale
také další zařízení (motorová ostření, kopule nebo odsuvné
střechy, GPS přijímače apod.).
SIPS zahrnuje nástroje pro automatickou pointaci, včetně
tzv. „dithering“ (řízené vzájemné posuny mezi
jednotlivými snímky). Jsou podporovány oba způsoby ovládání
montáže — přes rozhraní
„autoguider“ port (kabel s 6 vodiči) a také
„Pulse-Guide API“ programové rozhraní ovladače montáže.
Pro velmi kvalitní montáže, schopné sledoval pole bez nutnosti
pointace po dobu jedné expozice, podporuje SIPS mezi-snímkovou
pointaci pouze na základě porovnávání snímků z hlavní
zobrazovací kamery.
")
SIPS ovládající celou hvězdárnu (zobrazen v tmavé
barevné paletě) Schopnosti programu SIPS nekončí u ovládání kamery a
hvězdárny. SIPS obsahuje řadu nástrojů pro kalibraci snímků,
práci s 16 a 32 bitovými FITS
soubory, zpracování celých množin snímků (např. medián množiny
apod.), transformace snímků, export snímků do běžných formátů
atd.
SIPS pracuje s FITS soubory, podporuje kalibrace i
zpracování snímků Protože prví „S“ ve zkratce SIPS znamená
„Scientific“ (vědecký), program podporuje astronomickou
redukci snímků a také fotometrické zpracování celých řad.
SIPS se soustřeďuje na astrometrické a fotometrické
zpracování snímků, ale obsahuje i základní funkce pro
zpracování astronomických fotografií Program SIPS je zdarma ke stažení z tohoto www serveru. Všechny funkce
jsou podrobně popsány v uživatelské příručce, nainstalované s
každou kopií programu.
Automatická pointace
Programový systém SIPS dovoluje automatickou pointaci
montáže dalekohledu s použitím samostatné pointační
kamery. Správně a spolehlivě pracující automatická
pointace využívající výhod výpočetního výkonu počítačů PC
(např. výpočet centroidu pointační hvězdy z mnoha pixelů
dovolující dosažení sub-pixelové přesnosti) není úplně
triviální úkol. Tomu odpovídá i množství parametrů, které
je nutno programu zadat (nebo nechat automaticky
určit).

Okno nástroje „Guider“ programu
SIPS Nástroj „Guider“ pak dovoluje automatickou
pointaci zapínat a vypínat, kalibrovat parametry pointace
a přepočítávat je po změně deklinace dalekohledu bez
nutnosti nové kalibrace. Nová kalibrace také odpadá po
přeložení německé montáže. Okno také zobrazuje časové
průběhy zjištěných odchylek pointační hvězdy v obou osách
od referenční polohy. Délka vlastního průběhu i rozsah
grafů jsou volně nastavitelné, takže jejich zobrazení lze
přizpůsobit nepřesnostem a délce periodické chyby dané
montáže. Také je zobrazován kompletní záznam o kalibraci,
zjištěných odchylkách, provedených korekcích apod. Záznam
lze kdykoliv uložit do textového souboru.
Alternativou klasické pointace je mezisnímková
pointace, navržená pro moderní montáže, které jsou natolik
přesné, že udrží chod se sub-pixelovou přesností po dobu
jediné expozice a viditelné nepravidelnosti se objeví až
za dobu přesahující několik expozic. Mezisnímková pointace
pak provádí jemné opravy polohy montáže mezi jednotlivými
expozicemi, což zamezuje „cestování“ snímaných
objektů po ploše detektoru během doby pozorování. Tato
metoda pointace používá hlavní kameru, nevyužívá další
pointační kameru a přirozeně nepotřebuje ani OAG nebo
samostatný pointační dalekohled.

Parametry mezisnímkové pointace v záložce
„Pointace“ okna nástroje Kamera Pokročilá rekonstrukce barev z barevných
kamer
Barevné snímače mají červené, zelené a modré filtry
(Bayerova maska) aplikovány přímo na jednotlivé
pixely.
Každý pixel registruje světlo pouze určité barvy
(červené, zelené nebo modré). Barevný snímek ale obsahuje
informaci o všech barvách v každém pixelu. Je tedy
nezbytné dopočítat ostatní barvy z hodnot okolních
pixelů..
Existuje řada způsobů jako dopočítat chybějící barvy
jednotlivých pixelů — od
jednoduchého rozšíření barev do okolních pixelů (tato
metoda vede k obrázkům s viditelnými barevnými chybami)
přes přesnější metody bilineární nebo bikubické
interpolace okolních pixelů až po sofistikované
víceprůchodové metody.
Bilineární interpolace poskytuje výrazně lepší výsledky
než prosté rozšíření chybějících barev do okolních pixelů
a přitom je dostatečně rychlá. Pokud je ale rozlišení
optiky blízké velikosti jednotlivých pixelů, u jemných
detailů vznikají barevné artefakty, jak ukazuje obrázek
dole vlevo.
Syrový obraz nahoře s barvami dopočítanými
bi-lineární interpolací (vlevo) a stejný syrový snímek,
ale zpracovaný víceprůchodovým algoritmem rekonstrukce
barev (vpravo) Víceprůchodová metoda je výrazně pomalejší ve srovnání
s jednoprůchodovou bilineární interpolací, její výsledky
jsou ale zejména v detailech výrazně lepší. Tato metoda
dovoluje využít rozlišení barevných kamer skutečně na
maximum.
SIPS nabízí volbu metody interpolace Bayerovy masky
v nástrojích „Image Transform“ i „New Image
Transform“. Pro rychlé náhledy nebo v případě, že
nejmenší zobrazený detail svými rozměry hodně převyšuje
velikost jednoho pixelu (ať již vlivem optiky či
atmosféry), je rychlá bilineární interpolace dostačující.
Pro nejlepší výsledky je ale vhodné použít víceprůchodovou
metodu.
Ovladače pro programy třetích stran
Pravidelně aktualizovaný Sofware Development Kit pro Windows dovoluje
ovládat všechny kamery z libovolných aplikací, stejně jako z
prostředí Python apod.
K dispozici jsou ovladače standardu ASCOM a také ovladače
po programové systémy třetích stran (např. TheSkyX, AstroArt,
atd.). Navštivte stránku download tohoto www serveru se seznamem všech
ovladačů.
Knihovny a ovladače standardu INDI pro 32 bitový i 64 bitový Linux pracující na procesorech x86 a
ARM jsou rovněž k dispozici ke stažení. S kamerou jsou dodávány také
ovladače pro program TheSkyX pracující pod systémem macOS.
Dodávky a balení
Kamery C1× jsou dodávány
v pevných kufřících s pěnovou výplní obsahující:
Hlavu kamery s uživatelem zvoleným adaptérem. Pokud je
kamera objednána spolu s filtrovým kolem a případně s filtry,
kolo je zamontováno v hlavě a osazeno zvolenými filtry. Napájecí zdroj 100-240 V AC/12 V DC
s 1.8 m výstupním kabelem. 2 m dlouhý USB 3.0 A-B kabel
pro připojení kamery k počítači. USB Flash Drive s ovladači kamery, instalací programu
SIPS, elektronickou dokumentací a PDF verzí manuálu
kamery. Tištěnou kopii manuálu kamery.
Galerie snímků
Ukázky snímků pořízených kamerami řady C3 a C1×.
 |
| Objekt |
M16 „Orlí“ mlhovina |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
Hα, SII, OIII |
| Expozice |
3 hodin |
| Telescope |
600 mm RC, redukován
na f/4.5 |
|
 |
| Objekt |
NGC 4038 / NGC 4039 galaxie„Antény“ |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
Hα, SII, OIII, L, R, G,
B |
| Expozice |
5 hodin |
| Telescope |
600 mm RC, redukován
na f/4.5 |
|
 |
| Objekt |
SH2-274 „Medůza“ mlhovina |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
Hα, OIII, R, G, B |
| Expozice |
8,25 hodin |
| Telescope |
600 mm RC, redukován
na f/4.5 |
|
 |
| Objekt |
NGC6334 mlhovina |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
Hα, SII, OIII |
| Expozice |
9 hodin |
| Telescope |
600 mm RC, redukován
na f/4.5 |
|
 |
| Objekt |
NGC1977 mlhovina „Běžící muž“ |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
L, R, G, B |
| Expozice |
5,5 hodin |
| Dalekohled |
600 mm RC, redukován
na f/4.5 |
|
 |
| Objekt |
M1 „Krabí“ mlhovina |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
L, R, G, B |
| Expozice |
8 hodin |
| Dalekohled |
600 mm RC, redukován
na f/4.5 |
|
 |
| Objekt |
IV5148 mlhovina |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
Hα, OIII, R, G, B |
| Expozice |
9 hodin |
| Dalekohled |
600 mm RC, redukován
na f/4.5 |
|
 |
| Objekt |
IC346 mlhovina |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
Hα, SII, OIII |
| Expozice |
12 hodin |
| Dalekohled |
600 mm RC, redukován
na f/4.5 |
|
 |
| Objekt |
mlhovina „Koňská hlava“ |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
L, R, G, B |
| Expozice |
2,5 hodin |
| Dalekohled |
600 mm RC, redukován
na f/4.5 |
|
 |
| Objekt |
NGC5128 „Centaurus A“ galaxie |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtery |
L, R, G, B |
| Expoice |
4,5 hodin |
| Dalekohled |
600 mm RC, redukován
na f/4.5 |
|
 |
| Objekt |
NFC7293 mlhovina „Helix“ |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
L, R, G, B, Hα, |
| Expozice |
8.7 hodiny |
| Dalekohled |
600 mm RC, redukován
na f/4.5 |
|
 |
| Objekt |
mlhovina NGC3324 |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
L, R, G, B |
| Expozice |
6 hodin |
| Dalekohled |
600 mm RC, redukován
na f/4.5 |
|
 |
| Objekt |
mlhoviny „Koňská hlava“ a „Plamen“
nebulae |
| Autor |
Efrem Frigeni |
| Kamera |
C3-26000 |
| Filtry |
R, G, B |
| Expozice |
5 hours |
| Dalekohled |
FSQ 106/530 + CCA250/1250 |
|
 |
| Objekt |
galaxie NGC300 |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
L, R, G, B, Hα, |
| Expozice |
7.5 hodiny |
| Dalekohled |
600 mm RC, redukován
na f/4.5 |
|
 |
| Objekt |
M42 „Velká mlhovina v Orionu“ |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
R, G, B |
| Expozice |
30 minut |
| Dalekohled |
600 mm RC, redukován
na f/4.5 |
|
 |
| Objekt |
mlhoviny IC59 and IC63 |
| Autor |
Martin Myslivec |
| Kamera |
C3-61000 |
| Filtry |
Hα, R, G, B |
| Expozice |
21,5 hodiny |
| Dalekohled |
400 mm, f/4
Newton |
|
 |
| Objekt |
galaxie NGC1365 |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
L, R, G, B |
| Expozice |
4.5 hodiny |
| Dalekohled |
600 mm RC, redukován
na f/4,5 |
|
 |
| Objekt |
galaxie NGC253 |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
L, R, G, B |
| Expozice |
4 hodiny |
| Dalekohled |
600 mm RC, redukován
na f/4,5 |
|
 |
| Objekt |
galaxie NGC1532 |
| Autor |
Wolfgang Promper |
| Kamera |
C3-61000 |
| Filtry |
L, R, G, B |
| Expozice |
4.7 hodiny |
| Dalekohled |
600 mm RC, redukován
na f/4,5 |
|
 |
| Objekt |
mlhovina SH2-171 |
| Autor |
Andrea Lucchetti |
| Kamera |
C3-61000 |
| Filtry |
R, G, B |
| Expozice |
3 hodiny |
| Dalekohled |
200 mm, f/4,5
Newton |
|
 |
| Objekt |
NGC6992 „Řasy“ |
| Autor |
Martin Myslivec |
| Kamera |
C3-61000 |
| Filtry |
Hα, OIII, R, G, B |
| Expozice |
19 hodin |
| Dalekohled |
400 mm, f/4
Newton |
|
|