- C5 Series CMOS Cameras
- C5 Camera Overview
- CMOS Sensor and Camera Electronics
- Cooling and power supply
- Mechanical Specifications
- Optional accessories
- Software Support
- Shipping and Packaging
- Image Gallery
C5 Camera Overview
C5 cameras are made in two versions:
Asymmetrical C5A variant look reveals the same
time-proven design school of the C3 and C4 series in both outer
shape and internal construction. The front cross-section of the
C5A cameras is the same as the C3 and C4 series, although the used
sensors are much larger. C5 head thickness corresponds to the
thickness of the Enhanced Cooling versions of the earlier
models.
Asymmetrical models also employ mechanical shutter, allowing to
capture dark or bias frames without a necessity to cover the
telescope aperture.
Symmetrical C5S variant main purpose is not to exceed
the central obstruction of reflecting telescopes with the camera
located in the primary focus. The asymmetrical variant typically
overhangs the central obstruction of smaller telescopes (with ~0.4
m primary mirror diameter), despite the central obstruction of
wide-field telescope is rather big.
Due to mechanical constrains, the symmetrical model lacks the
mechanical shutter.
| Feature |
Asymmetrical C5A |
Symmetrical C5S |
| 100 and 150 MPx
sensors |
Yes |
Yes |
| Compatibility with filter wheels |
Yes |
Yes |
| M68 and M85 tiltable adapters |
Yes |
Yes |
| Mechanical shutter |
Yes |
No |
| Optional GPS receiver |
Yes |
Yes |
| Hardware trigger input |
No |
Yes |
Asymmetrical and symmetrical model comparison Compared to C3 and C4 cameras, both C5A and C5S series feature
completely redesigned air cooling — more
powerful and also quieter than even the EC variants of the C3 and
C4. Also, the supplied AC/DC brick power adapter is more powerful
and employs more robust power plug.
Usage of large sensors required completely new design of the
telescope interface and the C5 series offers M68 × 1 threaded adapter only on the smaller
100 MPx C5 variant. Large
150 MPx version of the C5
standardizes on the M85 × 1 thread on
the tiltable adapter. Like in the case of the C4 series, the
internal filter wheel is not an option, external filter wheels are
necessary and the C5 camera are equipped to control new EFW-5XL
series of filter wheels. Huge sensors require huge 65 × 65 mm square
filters and EFW-5XL-5 is designed for five such filters. The
EFW-5XL-7 filter wheels for seven smaller 50 × 50 mm square
filters are available for 100 MPx C5
variant with smaller sensor.
Rich software and driver support allow usage of C5 camera
without necessity to invest into any 3rd party software package
thanks to included free SIPS software package. However, ASCOM (for
Windows) and INDI (for Linux) drivers and Linux driver libraries
are shipped with the camera, provide the way to integrate C5
camera with broad variety of camera control programs.
The C5 cameras are designed to work in cooperation with
a host Personal Computer (PC). As opposite to digital still
cameras, which are operated independently on the computer, the
scientific cooled cameras usually require computer for operation
control, image download, processing and storage etc. To operate
the camera, you need a computer which:
Is compatible with a PC standard and runs modern 32 or
64-bit Windows operating system. Is an x86 or ARM based computer and runs 32 or 64-bit
Linux operating system. Support for x64 based Apple Macintosh computers is also
included.
C5 cameras are designed to be attached to host PC through very
fast USB 3.0 port. While the C5 cameras remain compatible with
older (and slower) USB 2.0 interface, image download time is
significantly longer.
Alternatively, it is possible to use the Moravian Camera
Ethernet Adapter device. This device can connect up to four
Cx (and CCD based Gx) cameras of any type (not only C5, but also
C1, C2, C3 and C4) and offers 1 Gbps and 10/100 Mbps Ethernet
interface for direct connection to the host PC. Because the PC
then uses TCP/IP protocol to communicate with the cameras, it is
possible to insert WiFi adapter or other networking device to the
communication path.
Tip: Please note that the USB standard allows usage of cable
no longer than approx. 5 meters and USB 3.0 cables are even
shorter to achieve very fast transfer speeds. On the other side,
the TCP/IP communication protocol used to connect the camera over
the Ethernet adapter is routable, so the distance between camera
setup and the host PC is virtually unlimited. Download speed is naturally significantly slower when camera is
attached over Ethernet adapter, especially when compared with
direct USB 3 connection.
The camera must be connected to some optical system (e.g. the
telescope) to capture images. As the C5 cameras offer really large
sensors with 67 mm (150 MPx version) and 55 mm (100 MPx
version) diagonals, optical system must be capable to cover such
large field of view. The camera is designed for long exposures,
necessary to acquire the light from faint objects. If you plan to
use the camera with the telescope, make sure the whole
telescope/mount setup is capable to track the target object
smoothly during long exposures.
C5 camera head is designed to be used with or without external
filter wheel. The EFW-5XL external filter wheel with 50 × 50 mm filters is
suitable for C5A-100M camera only, large sensor C5A-150M model
needs EFW-5XL external filter wheel, designed for 65 × 65 mm
filters.

Schematic diagram of C5A camera system 
Schematic diagram of C5S camera system Components of C5 Camera system include:
C5A or C5S camera head External Filter Wheel „XL“ size 7-positions filter wheel for „XL“ housing for
50 × 50 mm square filters 5-positions filter wheel for „XL“ housing for
65 × 65 mm square filters Canon EOS bayonet adapter for the „XL“ size
External Filter Wheel with 44 mm
BFD M68 × 1 threaded adapter,
BFD is 35 mm when
mounted directly on camera head and
47,5 mm when
mounted on EFW M85 × 1 threaded adapter,
BFD is 31 mm when
mounted directly on camera head and
43,5 mm when
mounted on EFW C5-OAG (Off-Axis Guider Adapter) with M85 × 1 thread for the „XL“ size External
Filter Wheel with 61,5 mm BFD 10 mm long CS-to-1.25"
adapter, used to attach CS-mount (C-thread,
12,5 mm BFD)
compatible guider cameras to the OAG C1 or C0 guider camera Moravian Camera Ethernet Adapter (x86 CPU) Moravian Camera Ethernet Adapter (ARM
CPU)
CMOS Sensor and Camera Electronics
Both C5A and C5S cameras are equipped with Sony IMX rolling
shutter back-illuminated CMOS detectors with
3,76 × 3,76 μm square pixels. Despite the relatively small pixel
size, the full-well capacity over 50 ke- rivals the full-well
capacity of competing CMOS sensors with much greater pixels and
even exceeds the full-well capacity od CCD sensors with comparable
pixel size.
The used Sony sensors are equipped with 16-bit ADCs (Analog to
Digital Converters). 16-bit digitization ensures enough resolution
to completely cover the sensor exceptional dynamic range.
C5 camera models include:
| Model |
C5A/C5S-100M |
C5A/C5S-150M |
| CMOS sensor |
IMX461 |
IMX411 |
| Color mask |
None |
None |
| Resolution |
11664 × 8750 |
14208 × 10656 |
| Pixel size |
3,76 × 3,76 μm |
3,76 × 3,76 μm |
| Sensor size |
43,86 × 32,90 mm |
53,42 × 40,07 mm |
Camera Electronics
CMOS camera electronics primary role, beside the sensor
initialization and some auxiliary functions, is to transfer
data from the CMOS detector to the host PC for storage and
processing. So, as opposite to CCD cameras, CMOS camera design
cannot influence number of important camera features, like the
dynamic range (bit-depth of the digitized pixels).
Sensor linearity
The sensors used in C5 cameras show very good linearity in
response to light. This means the camera can be used for
advanced research projects, like the photometry of variable
stars and transiting exoplanets etc.
Download speed
C5 cameras are equipped with on-board RAM, capable to hold
several full-resolution frames. Downloading of the image to
the host computer thus does not influence image digitization
process, as the download only transfers already digitized
images from camera memory.
Time needed to digitize and download single full frame
depends on USB connection type.
| Model |
C5A/C5S-100M |
C5A/C5S-150M |
| Full-frame, USB 3.0 (5 Gbps) |
0,66 s |
0,95 s |
| Full-frame, USB 2.0 (480 Mbps) |
5,57 s |
6,80 s |
If only a sub-frame is read, time needed to digitize and
download image is naturally lower. However, the download time
is not cut proportionally to number of pixels thanks to some
fixed overhead time, independent on the sub-frame
dimensions.
| Model |
C5A/C5S-100M |
C5A/C5S-150M |
| 1024 × 1024
sub-frame, USB 3.0 (5 Gbps) |
0,05 s |
0,05 s |
| 1024 × 1024
sub-frame, USB 2.0 (480 Mbps) |
0,07 s |
0,07 s |
Upozornění: The driver is sometimes forced to read bigger
portions of the sensor than the user defined because of a
sub-frame position and dimension limitations imposed by the
sensor hardware. Sometimes it is even necessary to read the
whole sensor. Tip: It is recommended to click the Adjust Frame
button in the Frame tab of the SIPS camera control
tool. The selected frame dimensions are then adjusted
according to sensor limitations. Adjusted frame is then read
from the sensor, without a necessity to read a bigger portions
or even whole sensor and crop image in firmware. C5 camera electronics supports in-camera 2 × 2 binning. If this binning mode is used,
download speed increases because of less amount of data read
from camera.
| Model |
C5A/C5S-100M |
C5A/C5S-150M |
| Full-frame 2 × 2 HW
binning, USB 3.0 (5 Gbps) |
0,43 s |
0,60 s |
| Full-frame 2 × 2 HW
binning, USB 2.0 (480 Mbps) |
1,15 s |
1,71 s |
Download speed when using the Moravian Camera Ethernet
Adapter depends if the 100 Mbps or 1 Gbps Ethernet is used, if
USB 2 or USB 3 is used to connect camera to Ethernet Adapter
device, but also depends on the particular network utilization
etc. When the camera is connected to the Ethernet Adapter
using USB 3 and 1 Gbps Ethernet is directly connected to the
host PC, download time of the C5-100M full frame is approx.
4 s and the
C5-150M needs approx. 6 s.
Camera gain
Sensors used in C5 cameras offer programmable gain from 0
to 36 dB, which translates to the output signal multiplication
from 1× to 63×.
Camera driver accepts gain as a number in the range 0 to
4030, which corresponds directly to sensor register value.
This number does not represent gain in dB nor it is an exact
gain multiply. However, the driver offers a function, which
transforms the gain numerical value to gain expressed in dB as
well as multiply. Some selected values are shown in the
table:
| Gain number |
Gain in dB |
Gain multiply |
| 0 |
0,00 |
1,00× |
| 1000 |
2,34 |
1,32× |
| 2000 |
5,82 |
1,95× |
| 3000 |
11,46 |
3,74× |
| 4000 |
32,69 |
43,11× |
| 4030 |
35,99 |
63,00× |
Conversion factors and read noise
Generally, many sensor characteristics depend on the used
gain. Also, the used sensors employ two conversion paths. One
path offers very low read noise, but cannot utilize full
sensor dynamic range. Another conversion path offers maximum
pixel capacity, but at the price of higher read noise. The
cross point is set to gain 3×
(approx. 10 dB), where the full
well capacity drops from more than 50 ke- to ~17 ke-. The read noise then drops from
~3,2 e- RMS to
~1,5 e- RMS.
| Gain number |
Gain in dB |
Gain multiply |
Conversion factor |
Read noise RMS |
Full well capacity |
| 0 |
0,0 dB |
1× |
0,76 e-/ADU |
3,52 e- |
50 000 e- |
| 2749 |
9,7 dB |
3× |
0,25 e-/ADU |
3,13 e- |
16 500 e- |
| 2750 |
9,7 dB |
3× |
0,25 e-/ADU |
1,51 e- |
16 500 e- |
| 4030 |
36,0 dB |
63× |
0,012 e-/ADU |
1,28 e- |
800 e- |
Sensor dynamic range, defined as full well capacity
divided by read noise, is greatest when using gain 0,
despite somewhat higher read noise:
At gain = 0, dynamic range is
50 000 / 3,52 = 14 205× At gain = 2750, dynamic range is
16 500 / 1,51 = 10 927×
Also, it is worth noting that in reality the noise floor is
only rarely defined by read noise. Unless the camera is used
with very narrow narrow-band filter (with FWHM only a few nm)
and under very dark sky, the dominant source of noise is the
sky glow. When the noise generated by sky glow exceeds
approximately 4 e- RMS, extremely
low read noise associated with gain set to 2750 or more is not
utilized and dynamic range is unnecessarily limited by the
lowered full well capacity.
So, which gain settings is the best? This depends
on the particular task.
Gain set to 2750 can be utilized if imaging through
narrow-band filter with appropriately short exposures, so
the background noise does not exceed the read noise. This is
typical for aesthetic astro-photography, where the lowered
full well capacity does not negatively influence the result
quality. But even without narrow-band filters, the
extremely low read noise allows stacking of many short
exposures without unacceptable increase of the stacked image
background noise, caused by accumulation of high read noise
of individual exposures. Gain set to 0 offers maximum full well capacity and
the greatest sensor dynamic range, which is appreciated
mainly in research applications. Pass-bands of filters used
for photometry are relatively wide and dominant source of
noise is the sky glow. But also for RGB images, used
for aesthetic astro-photography, higher dynamic range allows
longer exposures while the bright portions of the nebulae
and galaxies still remain under saturation limit and thus
can be properly processed.
Binning
The camera driver and user’s applications offer wide
variety of binning modes up to 4 × 4 pixels as well as all combinations of
asymmetrical binning modes 1 × 2,
1 × 3, 1 × 4, 2 × 4
etc. To allow such flexibility, binning is performed only in
the camera driver (software binning) and does not rely on the
limited capabilities of the hardware binning.
The negative side of software binning is the same download
time like in the case of full-resolution 1 × 1 mode. For typical astronomy usage, the
small fraction of second download time is irrelevant, but for
applications sensitive to download time, the hardware
2 × 2 binning can be useful.
Hardware binning
The C5 camera implements 2 × 2 binning mode in hardware in
addition to normal 1 × 1
binning. This mode can be turned on and off using the
HWBinning parameter in the 'cXusb.ini'
configuration file, located in the same directory like the
'cXusb.dll' driver DLL file itself.
[driver]
HWBinning = true
When the HWBinning parameter is set to
true, the in-camera hardware binning is used and
software binning is no longer available. This mode
brings faster download time, but also introduces several
restrictions:
Maximal binning is limited to 2 × 2, higher binning modes are not
available. Asymmetrical binning modes (1 × 2, 2 × 1, ...) are not allowed.
Adding vs. averaging pixels
The traditional meaning of pixel binning implies adding
of binned pixels. This originated in CCD sensors, where
pixel charges were literally poured together within the
sensor horizontal register and/or the output node.
For CMOS sensors with full 16-bit dynamic resolution,
the negative side of binning is limiting of the sensor
dynamic range, as for instance only 1/4 of maximum charge
in each of the 2 × 2 binned
pixels leads to saturation of resulting pixel. CCDs
eliminated this effect to some extend by increasing of the
charge capacity of the output node and also by decreasing
of the conversion factor in binned modes. But such
possibilities are not available in CMOS detectors.
In theory, the resulting S/N ratio of binned
pixel remains the same regardless if we add or average
them. Let's take for example 2 × 2 binning:
If we add 4 pixels, signal increases 4-times and
noise increases 2-times — three
additive operations increase noise by
√((√2)^2+(√2)^2 ). Resulting S/N
increases 2-times, but only until the sum of all pixels
is lower than the pixel capacity. If we average 4 pixels, signal remains the same
but the noise is lowered to 1/2 as noise is averaged
√((√2)^2+(√2)^2 )/4. Resulting S/N
also increases 2-times, but only until the noise
decreases to lowest possible 1-bit of dynamic
range.
As the C5 camera read noise in the maximum dynamic
range (gain 0) is around 3,5 e-, halving
it in 2 × 2 binning mode
still keeps the read noise above the lower 1-bit limit and
at the same time binned pixel will not saturate. For
higher binning modes, the noise approaches lower limit,
but averaging pixels still protects from pixel saturation,
which is more important than possible S/N limitation
caused by underflow of read noise.
If we take into account that the image background noise
is only rarely defined by the read noise of the sensor, as
the noise caused by background sky glow is typically much
higher, for 16-bit camera averaging pixels is definitely
the better way to bin pixels compared to just adding them.
This is why both software and hardware binning modes in
the C5 cameras are by default implemented as averaging of
pixels, not summing.
However, both software and hardware binning modes can
be switched to sum binned pixels instead of average them
by the BinningSum parameter in the
'cXusb.ini' configuration file:
[driver]
BinningSum = true
Tip: Let’s note there is one more possibility to bin
pixels — in the application
software. This time binning is not performed in camera
hardware nor in the camera driver. Full resolution
1 × 1 image is downloaded
from the camera and software itself then performs binning.
The SIPS software adds pixels instead of averaging them,
but at the same time SIPS converts images from 16-bit to
32-bit dynamic range. This means S/N of the binned images
always increases, pixels never saturate and read noise
never approaches lower limit. The negative side of this
option is two-time bigger images. Binning in photometry
Saturated pixels within bright stars are no issue for
aesthetic astro-photography, but photometry measurement is
invalid if any pixel within the measured object reaches
maximum value, because it is not possible to determine the
amount of lost flux. Software performing photometry (e.g.
the SIPS Photometry tool) should detect saturation value
and invalidate entire photometric point not to introduce
errors.
But binning efficiently obliterates the fact that any
of the binned pixels saturated (with the exception of all
binned pixels reached saturation value). So, using of
binning modes for research applications (photometry and
astrometry) can lead to errors caused by lost flux in
saturated pixels, which cannot be detected by the
processing software due to binning.
This is why the behavior of both software and hardware
binning modes is user-configurable through the
BinningSaturate parameter in the
'cXusb.ini' configuration file:
[driver]
BinningSaturate = true
If the BinningSaturate parameter is set to
true, resulting binned pixel is set to saturation value if
any of the source pixels is saturated. For aesthetic
astro-photography, keeping this parameter false could
result into slightly better representation of bright star
images, but for research applications, this parameter
should always be set to true.
Exposure control
The shortest theoretical exposure time of the C5
cameras depends on the used sensor type:
However, such short exposures have no practical
application, especially in astronomy. The camera firmware
rounds exposure time to a multiply of 100 μs intervals, so in
reality the shortest exposure time of both camera models is
200 μs.
There is no theoretical limit on maximal exposure length,
but in reality, the longest exposures are limited by
saturation of the sensor either by incoming light or by dark
current (see the following chapter about sensor cooling).
Upozornění: Please note the short exposure timing is properly
handled in the camera firmware version 6.5 and
later. C5A mechanical shutter
C5A cameras are equipped with mechanical shutter, which
is very important feature allowing unattended observations
(fully robotic or just remote setups). Without mechanical
shutter, it is not possible to automatically acquire dark
frames, necessary for proper image calibration etc.
Mechanical shutter in the C5A cameras is designed to be
as reliable as possible, number of open/close cycles is
virtually unlimited, because there are no surfaces rubbing
against each other. The price for high reliability is slow
shutter motion. Luckily, mechanical shuttering is not
necessary for exposure control, only for taking dark
frames and possibly bias frames — all used CMOS sensors are equipped with
electronic shuttering.
Camera firmware optimizes the shutter operation to
avoid unnecessary movements. If a series of light images
is taken immediately one after another, the shutter
remains open not to introduce quite significant delay of
the close/open cycle between each pair of subsequent light
images. In the case next image has to be dark or bias
frame, shutter closes prior to dark frame exposure and
vice versa — shutter remains closed
if a series of dark frames is acquired and opens only
prior to next light frame. If no exposure is taken for
approx. 10 seconds while the
shutter is open (this means after a light image exposure),
camera firmware closes the shutter to cover the sensor
from incoming light.
C5S hardware trigger input
The C5S trigger input allows for external hardware to
determine the exact time of exposure start.
The port uses RJ9 (4P4C) four-pin connector. Pins 1 and
2 are connected and have a function of positive pole, pins
3 and 4 are connected to negative pole. The trigger is
activated when an external hardware connects pins 1 and/or
2 with pins 3 and/or 4. The trigger input port is
electrically isolated from the rest of the
camera — power and USB grounds
etc.
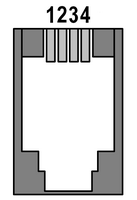 |
| 1 |
Positive (+) pin No. 1 |
| 2 |
Positive (+) pin No. 2 |
| 3 |
Negative (-) pin No. 1 |
| 4 |
Negative (-) pin No. 2 |
|
The maximum current, consumed by the short-circuited
trigger port, does not exceed 1 mA.
The trigger input is located on the upper-left portion
of the C5S camera back side, just above the power input
plug.
 and C5A (right) cameras")
Back side of the C5S (left) and C5A (right)
cameras GPS exposure timing
C5 cameras can be equipped with GPS receiver module
(see the Optional Accessories chapter). The primary
purpose of the GPS receiver is to provide precise times of
exposures taken with the camera, which is required by
applications dealing with astrometry of fast-moving
objects (fast moving asteroids, satellites, and space
debris on Earth orbit, …).
The GPS module needs to locate at least 5 satellites to
provide exposure timing information. Geographic data are
available if only 3 satellites are visible, but especially
the mean sea level precision suffers if less than 4
satellites are used.
The camera SDK provides functions, allowing users to
access precision exposure times as well as geographics
location. The SIPS software package main imaging camera
control tool window contains the „GPS“ tab, which
shows the state of the GPS fix.
Determination of exact exposure time is quite
complicated because of the rolling-shutter nature of the
used sensors. Camera driver does all the calculations
and returns the time of the start of exposure of the
first line of the image. Still, users interested in
precise exposure timing need to include several
corrections into their calculations:
Individual image lines are exposed sequentially.
The time difference between start of exposure of two
subsequent lines is fixed for every sensor type:
C5A/C5S-100M line exposure takes
40,944 μs C5A/C5S-150M line exposure takes
45,833 μs If the image is binned, single line of resulting
image contains signal from multiple added (or averaged)
lines, each with different exposure time start. The
exposure start of individual lines of the binned images
differs by the single line time difference, multiplied
by the vertical binning factor. If only a sub-frame is read, it must be
considered that the sensor imposes some restrictions to
the sub-frame coordinates. If the required sub-frame
coordinates violate the sensor-imposed rules, camera
driver enlarges the sub-frame region to fully contain
desired sub-frame and then crops it by software. The
provided start exposure time then concerns the first
line actually read from the camera, not the first line
of the resulting (software cropped) image. For
instance, the y-coordinate of the sub-frame must not be
lower than 25 lines. If a sub-frame with lower
y-coordinate is asked by the user, whole frame is read
and cropped by software. Note the camera SDK offers
function AdjustSubFrame, which returns the
smallest sub-frame, fully containing the requested
sub-frame, but also fulfilling the sensor-imposed
sub-frame coordinate restriction. If adjusted sub-frame
is read, no software cropping occurs and image exposure
time concerns the first line of the image. The SIPS
software offers the „Adjust Frame“ button, which
adjusts defined sub-frame.
Upozornění: Please note the precise exposure timing is
properly handled in the camera firmware version 7.10 and
later. Always use the latest camera drivers (ASCOM or Camera
SDK DLLs in Windows, INDI or libraries in Linux) available
on the web. Also, always update the firmware in the
Moravian Camera Ethernet Adapter if the camera is
connected over Ethernet.
Cooling and power supply
Regulated thermoelectric cooling is capable to cool the CMOS
sensor up to 45 °C below ambient temperature. The Peltier hot side
is cooled by fans. The sensor temperature is regulated with
±0.1 °C precision. High temperature drop and precision regulation
ensure very low dark current for long exposures and allow proper
image calibration.
The airflow is slightly different between C5A and C5S
models.
 and C5A (right) camera vents")
The C5S (left) and C5A (right) camera vents The cooling performance depends on the environmental conditions
and also on the power supply. If the power supply voltage drops
below 12 V, the maximum temperature
drop is lower.
| Sensor cooling |
Thermoelectric (Peltier modules) |
| Cooling ΔT |
45 °C below ambient regulated |
|
48 °C below ambient maximum |
| Regulation precision |
0,1 °C |
| Hot side cooling |
Forced air flow |
Chip cooling specifications 
C5A-100M cameras reaching -45°C below ambient sensor
temperature Overheating protection
The C5 cameras are equipped with an overheating protection
in their firmware. This protection is designed to prevent the
Peltier hot side to reach temperatures above ~50°C sensor
cooling is turned off to stop heat generation by the hot side
of the Peltier TEC modules.
Turning the overheating protection on results in a drop in
cooling power, a decrease in the internal temperature of the
camera and an increase in the temperature of the sensor.
However, when the camera cools its internals down below the
limit, cooling is turned on again. If the environment
temperature is still high, camera internal temperature rises
above the limit an overheating protection becomes active
again.
Power supply
The 12 V DC power supply enables camera operation
from arbitrary power source including batteries, wall adapters
etc. Universal 100-240 V
AC/50-60 Hz, 120 W „brick“ adapter is supplied with
the camera. Although the camera power consumption does not
exceed 60 W, the 120 W power supply ensures noise-free
operation.
| Camera power supply |
12 V DC |
| Camera power consumption |
<9 W without cooling |
| |
60 W maximum cooling |
| Power connector |
4-pin plug |
| Adapter input voltage |
100-240 V AC/50-60 Hz |
| Adapter output voltage |
12 V DC/10 A |
| Adapter maximum power |
120 W |
Power supply specification 
12 V DC/10 A power supply adapter for C5
camera Mechanical Specifications
Compact and robust camera head measures only 154 × 154 × 76 mm (approx.
6 × 6 × 3 inches).
The head is CNC-machined from high-quality aluminum and black
anodized. The head itself contains USB-B (device) connector and
4-pin 12 V DC power plug, no other parts, except a
„brick“ power supply, are necessary. Another connector on
the camera head allows control of optional external filter
wheel.
Integrated mechanical shutter of the C5A models allows
automatic dark frame exposures, which are necessary for
unattended, robotic setups.
| Internal mechanical shutter |
C5A yes, blade shutter |
| |
C5S no |
| Camera head dimensions |
154 mm × 154 mm × 76 mm |
| Camera head weight |
1,9 kg
(without filter wheel) |
| |
2,8 kg
(with the „XL“ external filter wheel) |
Mechanical specification C5A camera head front view

C5A camera head interface for filter wheel or
tiltable adapter base Filter wheels or tiltable adapter base are attached to the
camera head using six M3 screws around the 70 mm diameter ring.
C5A camera with M85 × 1
threaded adapter

C5A camera head with M85 × 1 adapter front view 
C5A camera head with M85 × 1 adapter side view with back focal
distance 
C5A camera with External Filter wheel with
M85 × 1 adapter Back Focal
Distance The stated back focal distances (BFD) include corrections
for all optical elements in the light path (cold chamber
optical window, sensor cover glass, ...), fixed in the camera
body. So, stated values are not mechanical, but optical back
focal distances. However, no corrections for filters are
included, as the thicknesses of various filters are very
different.
Tip: Note the M85 × 1 adapter
is also equipped with eight M3 threaded holes arranged around
the 91 mm diameter circle. These
threaded holes provide alternative mean of camera attachment
to the optical system. C5A camera with M68 × 1
threaded adapter
There are two variants of the M68 × 1 adapter available. The
version 1 consists of two parts (the base and the M68 threaded
ring attached with 5 screws) and thus its total height is
greater. The newer M68 × 1 adapter version 2 is
machined from one piece and its total height is smaller, which
results into shorter total BFD.

C5A camera head with M68 × 1 adapter front view 
C5A camera head with M68 × 1 v1 adapter Back Focal
Distance 
C5A camera head with M68 × 1 v2 adapter Back Focal
Distance 
C5A camera with External Filter wheel with
M68 × 1 v1 Back Focal
Distance 
C5A camera with External Filter wheel with
M68 × 1 v2 Back Focal
Distance C5A camera with Standalone Filter Wheel
While all EFWs from „XS“ to „L“ size are
designed to preserve the very same BFD on all Cx cameras, the
SFW naturally increased the BFD because of the design using
two overlapping wheels. The resulting BFD depends on the
adapter used.

C5A camera with Standalone Filter wheel with
M85 × 1 adapter Back Focal
Distance 
C5A camera with Standalone Filter wheel with
M68 × 1 version 2
adapter C5A camera with C5-OAG with M85 × 1 thread
C5-OAG is designed to be used with the XL-sized External
filter wheels only.

C5A camera with External Filter wheel with
C5-OAG 
C5A camera with External Filter wheel with C5-OAG
Back Focal Distance C5S camera head front view

C5S camera head interface for filter wheel or
tiltable adapter base Filter wheels or tiltable adapter base are attached to the
camera head using six M3 screws around the 70 mm diameter ring.
C5S camera with M85 × 1
threaded adapter

C5S camera head with M85 × 1 adapter front view 
C5S camera head with M85 × 1 adapter side view with back focal
distance 
C5S camera with External Filter wheel with
M85 × 1 adapter Back Focal
Distance The stated back focal distances (BFD) include corrections
for all optical elements in the light path (cold chamber
optical window, sensor cover glass, ...), fixed in the camera
body. So, stated values are not mechanical, but optical back
focal distances. However, no corrections for filters are
included, as the thicknesses of various filters are very
different.
Tip: Note the M85 × 1 adapter
is also equipped with eight M3 threaded holes arranged around
the 91 mm diameter circle. These
threaded holes provide alternative mean of camera attachment
to the optical system. C5S camera with M68 × 1
threaded adapter
There are two variants of the M68 × 1 adapter available. The
version 1 consists of two parts (the base and the M68 threaded
ring attached with 5 screws) and thus its total height is
greater. The newer M68 × 1 adapter version 2 is
machined from one piece and its total height is smaller, which
results into shorter total BFD.

C5S camera head with M68 × 1 adapter front view 
C5S camera head with M68 × 1 v1 adapter side view with back focal
distance 
C5S camera head with M68 × 1 v2 adapter side view with back focal
distance 
C5S camera with External Filter wheel with
M68 × 1 v1 adapter Back Focal
Distance 
C5S camera with External Filter wheel with
M68 × 1 v2 adapter Back Focal
Distance C5S camera with Standalone Filter Wheel
While all EFWs from „XS“ to „L“ size are
designed to preserve the very same BFD on all Cx cameras, the
SFW naturally increased the BFD because of the design using
two overlapping wheels. The resulting BFD depends on the
adapter used.

C5S camera with Standalone Filter wheel with
M85 × 1 adapter Back Focal
Distance 
C5S camera with Standalone Filter wheel with
M68 × 1 version 2
adapter C5S camera with C5-OAG with M85 × 1 thread
C5-OAG is designed to be used with the XL-sized External
filter wheels only.

C5S camera with External Filter wheel with
C5-OAG 
C5S camera with External Filter wheel with C5-OAG
Back Focal Distance Filter distance to sensor
It is necessary to know the distance of the filter entrance
aperture from the sensor to calculate possible vignetting
(partial shielding of the sensor edge parts from the incoming
lights). In the case of C5 cameras, this is technically not an
„aperture“, as the filters are squares. So, instead of
comparing filter aperture diameter to sensor diagonal, filter
hole linear dimension must be compared to the longer side of
the sensor.

Distance of the filter wheel entrance pupil from
the sensor The 7-positions filter wheel for 50 × 50 mm filters entrance dimension is
48 mm, 5-positions filter wheel
for 65 × 65 mm filters entrance
dimension is 63 mm. The C5A-100M
sensor longer side measures 43,86 mm, while the C5A-150M sensor longer side
measures 53,42 mm.
Optional accessories
Various accessories are offered with C5 cameras to enhance
functionality and help camera integration into imaging setups.
External filter wheels
The C5 camera contains electronics and an 8-pin connector
on the camera head to control filter wheels. As the mechanical
interface of the C5 cameras, intended to attach filter wheels,
differs from the interface on the C3 or C4 cameras (see the
chapter Camera head front view of the Mechanical Specification
section for details), C5 cameras are not compatible with the
„M“ or „L“ external filter wheels intended for
C3 or C4 lines. New „XL“ size external filter wheel is
designed especially for the C5 series.
C5 camera with the „XL“ filter wheel
attached The ”XL” filter wheel housing can accommodate two
filter wheels:
Standalone filter wheels
The external filter wheel diameter has construction limits,
it is not possible to simply increase both EFW shell and
filter wheel itself. The diameter and weight would be so big,
that usage of such wheels would not be practical.
Natural solution of this problem is placing of two smaller
filter wheels beside each other. The total number of filter
positions is lower than the sum of positions in both wheels
from obvious reasons: one position in each wheel must remain
empty (clear) and it is set as an actual position when a
filter from the other wheel is to be used not to interfere
with it. So, if for instance two filter wheels with five
positions each are used, we denote such wheel as
„8+Clear“ positions. This means four positions in both
wheels may be used for any filter, which makes 8 total filter
positions. When both filter wheels are set to index 0 (the
clear position), one additional clear position is added to the
total number of filter positions.
The SFW-5XL on the C5S camera The Standalone Filter Wheel (SFW), compatible with
C5 cameras, comes in the „XL“ flavor, which indicates
it is even greater than the larges „L“ sized EFW
available. Number of available positions depends on filter
size:
8+Clear positions for 65 × 65 mm square filters, suitable for C5
cameras (both asymmetrical C5A and symmetrical C5S
variants) 12+Clear positions for 50 × 50 mm square filters, suitable for
C5-100M cameras (with some vignetting over the sensor short
edge)
The SFW filter wheels are equipped with 12 V DC
5,5/2,5 mm power plug as
well as USB 1.1 data connection. Latest SIPS v4.1 and later
software contains native driver for these wheels, as well as
Moravian Camera Ethernet Adapter firmware, ASCOM drivers for
windows, Linux libraries and INDI/INDIGO drivers are available
etc. Also, the Moravian Camera SDK contains libraries, headers
and API description allowing to control the SFW from other
software packages as well as from Python etc.
Telescope adapters
There are basically only two types of telescope
adapters, available for C5 cameras:
M85 × 1 threaded
adapter, intended for both C5A-100M and C5A-150M camera
models. This adapter is also equipped with eight M3 threaded
holes arranged around the 91 mm
diameter circle, providing alternative possibility to attach
the C5 camera to the optical system. M68 × 1 threaded
adapter, suitable for C5A-100M camera only due to limited
aperture, possibly causing vignetting of the large sensor of
C5A-150M camera.
Both adapters have adjustable tilt and both can be mounted
either on the adapter base on the camera head or on the
External filter wheel front plane.
Off-Axis Guider adapter
C5 camera can be optionally equipped with Off-Axis Guider
Adapter. This adapter contains flat mirror, tilted by 45° to
the optical axis. This mirror reflects part of the incoming
light into guider camera port. The mirror is located far
enough from the optical axis not to block light coming to the
main camera sensor, so the optics must be capable to create
large enough field of view to illuminate the tilted
mirror.

Position of the OAG reflection mirror relative to
optical axis The C5-OAG offers the M85 × 1
thread on the telescope side. The back focal distance is
61,5 mm.
The C5-OAG is designed for cameras using the XL-size
external filter wheel. The guiding camera will not be able to
reach focus is the OAG is mounted directly to the camera
head.
C5-OAG adapter (left), OAG on then C5 camera with
External filter wheel (right) OAG guider port is compatible with C0 and C1 cameras when
mounted on the C5A camera. Mechanical constrains of the C5S
camera head allows usage of only smaller C0 models. It is
necessary to replace the CS/1,25” adapter
with short, 10 mm variant.
Because C1 cameras follow CS-mount standard, (BFD
12,5 mm), any
camera following this standard with 10 mm long 1,25” adapter
should work properly with the C5-OAG.
GPS receiver module
The C5 cameras can be equipped with an optional GPS
receiver module, which allows very precise timing of the
exposure times. Geographic location data are also available to
the control software through specific commands.
The used GPS receiver is compatible with GPS, GLONASS,
Galileo and BeiDou satellites.
The GPS receiver can be attached to the back side of the
camera head. If the GPS module is removed, the GPS port is
covered with a flat black cover.
The C5A (left) and C5A (right) cameras with GPS
receiver module with external antenna Spare desiccant containers
The C3 cameras are supplied with silicagel container,
intended to dry the sensor cold chamber. This container can be
unscrewed and desiccant inside can be dried in the oven (see
the camera User's Manual).

The whole desiccant container can be baked to dry
the silica-gel inside or its content can be poured out after
unscrewing the perforated internal cap and baked
separately Container shipped with the camera by default does not
exceed the camera head outline. It is equipped with a slot for
tool (or for just a coin), allowing releasing and also
tightening of the container. Containers intended for enhanced
cooling cameras are prolonged as the camera thickness is
greater in the case of this variant.
It is possible to order spare container, which makes
desiccant replacement easier and faster. It is possible to dry
the spare container with silicagel and then only to replace it
on the camera. Spare container is supplied including the
air-tight cap.
Spare container can be supplied also in a variant that
allows manipulation without tools. But this container is
longer and exceeds camera outline. If the space behind the
camera is not critical, this container can make desiccant
exchange even easier.

Optional cap, standard and tool-less container
variants Moravian Camera Ethernet Adapter
The Moravian Camera Ethernet Adapter allows connection of
up to 4 Cx cameras of any type on the one side and 1 Gbps
Ethernet on the other side. This adapter allows access to
connected Cx cameras using routable TCP/IP protocol over
practically unlimited distance.
The Moravian Camera Ethernet Adapter device (left)
and adapter with two connected cameras (right) Moravian Camera Ethernet Adapter devices are described in
detail here.
Software Support
Always use the latest versions of the system driver package for
both Windows and Linux system. Older versions of drivers may not
support new camera models (like C0) or latest versions or existing
series (like C1 version 3).
If the camera is controlled through the Moravian Camera
Ethernet Adapter, make sure the device firmware is updated to
the latest version available.
Also, always use the latest version of the SIPS software
package, older versions may not support latest cameras correctly.
If a driver for 3rd party software package is used
(e.g. ASCOM or INDI drivers), always update the driver to the
latest available version.
SIPS
Powerful SIPS (Scientific Image Processing System)
software, supplied with the camera, allows complete camera
control (exposures, cooling, filter selection etc.). Also
automatic sequences of images with different filters,
different binning etc. are supported. With full ASCOM standard
support, SIPS can be also used to control other observatory
equipment. Specifically the telescope mounts, but also other
devices (focusers, dome or roof controllers, GPS receivers
etc.).
SIPS also supports automatic guiding, including image
dithering. Both „autoguider“ port hardware interface
(6-wire cable) and mount „Pulse-Guide API“ guiding
methods are supported. For hi-quality mounts, capable to track
without the necessity to guide at least during one exposure,
inter-image guiding using the main camera only is
available.
")
SIPS controlling whole observatory (shown in
optional dark skin) But SIPS is capable to do much more than just camera and
observatory control. Many tools for image calibration, 16 and
32 bit FITS file handling, image
set processing (e.g. median combine), image transformation,
image export etc. are available.
SIPS handles FITS files, supports image calibration
and processing As the first „S“ in the abbreviation SIPS means
Scientific, the software supports astrometric image reduction
as well as photometric processing of image series.
SIPS focuses to advanced astrometric and
photometric image reduction, but also provides some very
basic astro-photography processing SIPS software package is freely available for download from this www site. All functions
are thoroughly described in the SIPS User's Manual, installed
with every copy of the software.
Automatic guiding
SIPS software package allows automatic guiding of the
astronomical telescope mounts using separate guiding
camera. Proper and reliable automatic guiding utilizing
the computational power of Personal Computer (e.g.
calculation of star centroid allows guiding with sub-pixel
precision) is not simple task. Guiding complexity
corresponds to number of parameters, which must be entered
(or automatically measured).

The SIPS „Guider“ tool window The „Guiding“ tool allows switching of
autoguiding on and off, starting of the automatic
calibration procedure and recalculation of autoguiding
parameters when the telescope changes declination without
the necessity of new calibration. Also swapping of the
German Equatorial mount no longer requires new autoguider
calibration. There is also a graph showing time history of
guide star offsets from reference position in both axes.
The length of graph history as well as the graph range can
be freely defined, so the graph can be adjusted according
to particular mount errors and periodic error period
length. Complete log of calibration procedure, detected
offsets, correction pulses etc. is also shown in this
tool. The log can by anytime saved to log file.
An alternative to classic autoguiding is the
inter-image guiding, designed for modern mounts, which are
precise enough to keep tracking with sub-pixel precision
through the single exposure, and irregularities only
appear on the multiple-exposure time-span. Inter-image
guiding then performs slight mount position fixes between
individual exposures of the main camera, which eliminates
„traveling“ of the observed objects through the
detector area during observing session. This guiding
method uses main imaging camera, it does not use another
guiding camera and naturally does not need neither OAG nor
separate guiding telescope to feed the light into it.

Inter-image guiding controls in the
Guiding tab of the Imager Camera tool
window Advanced reconstruction of color information of
single-shot-color cameras
Color sensors have red, green and blue filters applied
directly on individual pixels (so-called Bayer mask).
Every pixel registers light of particular color only
(red, green or blue). But color image should contain all
three colors for every pixel. So it is necessary to
calculate missing information from values of neighboring
pixels.
There are many ways how to calculate missing color
values — from simple extending of
colors to neighboring pixels (this method leads to coarse
images with visible color errors) to methods based on
bi-linear or bi-cubic interpolation to even more advanced
multi-pass methods etc.
Bi-linear interpolation provides significantly better
results than simple extending of color information to
neighboring pixels and still it is fast enough. But if the
telescope/lens resolution is close to the size of
individual pixels, color artifacts appear close to fine
details, as demonstrated by the image below left.
The above raw image with colors calculated
using bi-linear interpolation (left) and the same raw
image, but now processed by the multi-pass de-mosaic
algorithm (right) Multi-pass algorithm is significantly slower compared
to single-pass bi-linear interpolation, but the resulting
image is much better, especially in fine details. This
method allows using of color camera resolution to its
limits.
SIPS offers choosing of color image interpolation
method in both „Image Transform“ and „New Image
Transform“ tools. For fast image previews or if the
smallest details are significantly bigger than is the
pixel size (be it due to seeing or resolution of the used
telescope/lens) the fast bi-linear interpolation is good
enough. But the best results can be achieved using
multi-pass method.
Shipping and Packaging
C5 cameras are supplied in the foam-filled, hard
carrying case containing:
Camera body with a user-chosen telescope
adapter. A 100-240 V AC input, 12 V DC output
„brick“ adapter with 1 m
long power cable. 2 m long USB 3.0 A-B cable
for connecting camera to host PC. USB Flash Drive with camera drivers, SIPS software
package with electronic documentation and PDF version of
User's Manual. A printed copy of camera User's Manual
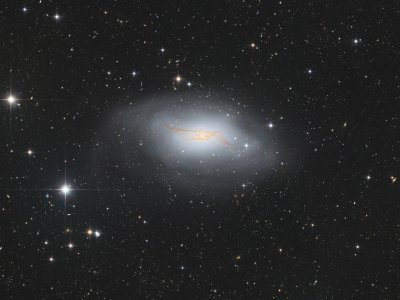
Image Gallery
Example images captured with C5 cameras.
 |
| Object |
NGC1760 |
| Author |
CielAustral group |
| Camera |
C5A-100M |
| Filters |
HOORGB |
| Telescope |
0.6 m CDK610 |
| Exposure |
71 hours 15 minutes |
|
 |
| Object |
NGC1760 |
| Author |
CielAustral group |
| Camera |
C5A-100M |
| Filters |
SHORGB |
| Telescope |
0.6 m CDK610 |
| Exposure |
92 hours 55 minutes |
|
 |
| Object |
LDN43 „Batman“ nebula |
| Author |
CielAustral group |
| Camera |
C5A-100M |
| Filters |
LRGB |
| Exposure |
42 hours, 45 minutes |
| Telescope |
PlaneWave CDK610 |
|
 |
| Object |
NGC1512 galaxy |
| Author |
CielAustral group |
| Camera |
C5A-100M |
| Filters |
LRGB |
| Exposure |
44 hours, 45 minutes |
| Telescope |
PlaneWave CDK610 |
|
 |
| Object |
WR8 (Wolf–Rayet star) |
| Author |
CielAustral group |
| Camera |
C5A-100M |
| Filters |
RGB + Hα + OIII |
| Exposure |
110 hours, 55 minutes |
| Telescope |
PlaneWave CDK610 |
|
 |
| Object |
NGC3469 galaxy |
| Author |
CielAustral group |
| Camera |
C5A-100M |
| Filters |
LRGB + Hα |
| Exposure |
72 hours, 50 minutes |
| Telescope |
PlaneWave CDK610 |
|
 |
| Object |
NGC2626 nebula |
| Author |
CielAustral group |
| Camera |
C5A-100M |
| Filters |
LRGB + Hα |
| Exposure |
62 hours, 50 minutes |
| Telescope |
PlaneWave CDK610 |
|
 |
| Object |
NGC3521 galaxy |
| Author |
CielAustral group |
| Camera |
C5A-100M |
| Filters |
LRGB + Hα |
| Exposure |
62 hours, 20 minutes |
| Telescope |
PlaneWave CDK610 |
|
 |
| Object |
M88 galaxy |
| Author |
CielAustral group |
| Camera |
C5A-100M |
| Filters |
LRGB + Hα |
| Exposure |
45 hours, 15 minutes |
| Telescope |
PlaneWave CDK610 |
|
 |
| Object |
M1 „Crab“ nebula |
| Author |
Wolfgang Promper |
| Camera |
C5A-150M |
| Filters |
Bessel B (as blue), Bessel V (as green), and
Sloan r' (as red) |
| Exposure |
1.5 hour luminance and 30 min each color
channel |
| Telescope |
1,5 m ASA |
|
 |
| Object |
NGC1398 galaxy |
| Author |
Wolfgang Promper |
| Camera |
C5A-150M |
| Filters |
Bessel B (as blue), Bessel V (as green), and
Sloan r' (as red) |
| Exposure |
1.5 hour luminance and 30 min each color
channel |
| Telescope |
1,5 m ASA |
|
 |
| Object |
Detailed core of the M42 nebula |
| Author |
Wolfgang Promper |
| Camera |
C5A-150M |
| Filters |
Bessel B (as blue), Bessel V (as green), and
Sloan r' (as red) |
| Exposure |
3 min 20'sec each
color channel |
| Telescope |
1,5 m ASA |
|
 |
| Object |
NGC253 galaxy core |
| Author |
Wolfgang Promper |
| Camera |
C5A-150M |
| Filters |
Sloan g' (as blue), r' (as green), and i' (as
red) |
| Exposure |
20, 20, 20 min |
| Telescope |
1,5 m ASA |
|
 |
| Object |
„Hour Glass“ nebula |
| Author |
Wolfgang Promper |
| Camera |
C5A-150M |
| Filters |
Sloan g' (as blue), r' (as green), and i' (as
red) |
| Exposure |
20, 20, 20 min |
| Telescope |
1,5 m ASA |
|
 |
| Object |
M16 „Eagle“ nebula |
| Author |
Wolfgang Promper |
| Camera |
C5A-150M |
| Filters |
Sloan g' (as blue), r' (as green), and i' (as
red) |
| Exposure |
20, 20, 20 min |
| Telescope |
1,5 m ASA |
|
 |
| Object |
Omega Centauri |
| Author |
Mark McComiskey |
| Camera |
C5A-100M |
| Filters |
LRGB |
| Exposure |
11 hours,
17 min |
| Telescope |
ASA 600 |
|
 |
| Object |
NGC4753 |
| Author |
Mark McComiskey |
| Camera |
C5A-100M |
| Filters |
LRGB |
| Exposure |
21 hours,
40 min |
| Telescope |
ASA 600 |
|
 |
| Object |
NGC5128 „Centaurus A“ galaxy |
| Author |
Wolfgang Promper |
| Camera |
C5A-150M |
| Filters |
Sloan g' (as blue), r' (as green), and i' (as
red) |
| Exposure |
20, 20, 20 min |
| Telescope |
1,5 m ASA |
|
 |
| Object |
M42 „Orion“ nebula |
| Author |
Bill Long |
| Camera |
C5A-150M |
| Filters |
L, R, G, B |
| Exposure |
448, 100, 106, 102 min |
| Telescope |
PlaneWave CDK14 |
|
 |
| Object |
M7 star cluster |
| Author |
Patrick Winkler |
| Camera |
C5A-150M |
| Filters |
L, R, G, B |
| Exposure |
66, 40, 40, 40 min |
| Telescope |
ASA H400, 400 mm
f/2,4 |
|
 |
| Object |
M42 „Orion“ nebula |
| Author |
Patrick Winkler |
| Camera |
C5A-150M |
| Filters |
R, G, B |
| Exposure |
45 min (15 min per color) |
| Telescope |
ASA H400, 400 mm
f/2,4 |
|
 |
| Object |
NGC3372 „Carina“ nebula |
| Author |
Patrick Winkler |
| Camera |
C5A-150M |
| Filters |
R, G, B |
| Exposure |
45 min (15 min per color) |
| Telescope |
ASA H400, 400 mm
f/2,4 |
|
|