|
Nová série pointačních a planetárních kamer CG se od série
C0 liší pouze tvarem pláště kamery:
Tělo kamery je ploché, aby nepřesahovalo přední stranu
OAG. USB a „autoguider“ porty jsou na zadní straně kamery,
místo na boční straně jako u kamer C0.
Nová kamera CG (vlevo) v porovnání s kamerou C0
(vpravo) Kamery CG jsou vybaveny CMOS snímači Sony IMX s globální
závěrkou a čtvercovými pixely velikosti
3,45 × 3,45 μm.
Jednotlivé modely se liší pouze rozlišením a dynamickým rozsahem.
| Model |
CMOS senzor |
Rozlišení |
Digitalizace |
Velikost pixelu |
Obrazová plocha |
| CG-1500 |
IMX273 |
1456 × 1088 pixelů |
8-bit, 12-bit |
3,45 × 3,45 μm |
5,02 × 3,75 mm |
| CG-3000 |
IMX252 |
2064 × 1544 pixelů |
8-bit, 12-bit |
3,45 × 3,45 μm |
7,12 × 5,33 mm |
| CG-3000A |
IMX265 |
2064 × 1544 pixelů |
12-bit |
3,45 × 3,45 μm |
7,12 × 5,33 mm |
| CG-5000 |
IMX250 |
2464 × 2056 pixelů |
28-bit, 12-bit |
3,45 × 3,45 μm |
8,50 × 7,09 mm |
| CG-5000A |
IMX264 |
2464 × 2056 pixelů |
12-bit |
3,45 × 3,45 μm |
8,50 × 7,09 mm |
C2 kamera s XS filtrovým kolem, C2-OAG a pointační kamerou
CG C5 kamera s XL filtrovým kolem, C5-OAG a pointační kamerou
CG Kamery CG byly navrhovány speciálně pro automatické pointování
montáží astronomických dalekohledů. Pracují ve spolupráci s počítačem
(PC). Korekce chodu montáže nejsou počítány v kameře samotné, ta jen
odesílá snímky do řídicího počítače. Software pracující v PC poté
spočítá rozdíl od požadovaného stavu a pošle korekce montáži
dalekohledu. Výhodou použití PC k výpočtu korekcí je skutečnost, že
současné počítače disponují výpočetním výkonem, který o mnoho řádů
přesahuje výkon i toho nejlepšího procesoru zabudovaného v kameře.
Algoritmy pointace pak mohou určit centroid hvězdy se sub-pixelovou
přesností, mohou srovnávat pozice všech hvězd detekovaných v zorném
poli a tím omezit vliv seeingu apod.
Vypočítané korekce mohou být odeslány zpět montáži prostřednictvím
komunikační linky mezi montáží a PC. Pokud ale řídicí jednotka montáže
nepodporuje tuto funkci (příkazy „Pulse Guide“), lze použít
tzv. „Autoguider“ port. Stačí spojit kameru CG s montáží 6 žilovým
kabelem a řídit montáž prostřednictvím kamery CG.

Standardní 6 pinový Autoguider port je umístěn vedle USB3
portu na zadní straně kamer CG Autoguider port odpovídá de-facto standardu zavedenému automatickým
pointerem SBIG ST-4. Význam pinů v konektoru je následující:
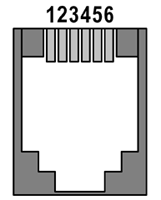 |
| 1 |
R.A. + (Vpravo) |
| 2 |
Dec + (Nahoru) |
| 3 |
Dec – (Dolů) |
| 4 |
R.A. – (Vlevo) |
| 5 |
Common (Zem) |
| 6 |
Nezapojeno |
|
|