|
Verze 2.1 programu SIPS je první „malé“ vydání programu od
uvedení SIPS v2.0, přidávající řadu nových funkcí. Následuje
po dvou „servisních“ vydáních SIPS v2.0.1 a SIPS v2.0.2, jejichž hlavní účel bylo odstranění
některých problémů, způsobených velmi výraznými změnami v návrhu
SIPS v2, a které přidaly jen velmi málo nových vlastností.
Instalace
SIPS byl vždy k dispozici jako řada spustitelných souborů
DLL knihoven, které bylo možno umístit (nakopírovat) do
jakéhokoliv adresáře (včetně např. USB Flash Drive apod.). SIPS
nevyžadoval instalaci, existenci nějakých klíčů v Registry
apod. To přineslo na jedné straně značnou volnost, (např. je možné
používat současně řadu verzí), ale tento přístup na druhé straně
vyžaduje, aby všechny potřebné komponenty (knihovny) byly již na
daném počítači nainstalovány. Počínaje verzí 2, SIPS je kompilován
překladačem Microsoft Visual C++ 2008, takže k běhu potřebuje
nainstalované knihovny tohoto vývojového systému. V řadě
systémů (typicky Window 7) jsou tyto knihovny už přítomny a pokud
ne (např. na starších Windows XP), je možné je zdarma stáhnout
z webového serveru společnosti Microsoft a nainstalovat
(přesné jméno je „Microsoft Visual C++ 2008 SP1 Redistributable
Package (x86)“). Přesto řada uživatelů zůstala bezradná když
pokus o spuštění programu SIPS skončil chybovou zprávou
o chybějící knihovně.
Z tohoto důvodu jsme se rozhodli dodávat SIPS také
v podobě instalovatelného balíčku. Instalační program
zkontroluje, jestli jsou všechny potřebné knihovny v systému
přítomny a pokud ne, nejprve je nainstaluje. Až poté je
nainstalován vlastní program SIPS.
Původní distribuce složené jen ze spustitelných souborů a DLL
knihoven je stále k dispozici na USB Flash Drive dodávaném
spolu s kamerami a také je možné ji stáhnout z www
serveru.
Nové vlastnosti
Některé nové vlastnosti se netýkají konkrétního
nástroje nebo algoritmu, ale celého programu SIPS.
SIPS akceptuje parametry příkazové řádky a interpretuje
je jako jména FITS souborů. Tyto soubory jsou otevřeny
v okamžiku spuštění programu. Nyní je možné ve Windows
Explorer přiřadit FITS soubory k programu SIPS.exe.
Spuštění FITS souboru (např. dvojklikem na jeho jméno ve Windows
Explorer) spustí SIPS a nechá jej otevřít patřičný soubor nebo
soubory. Řada nástrojů byla vybavena schopností přehrávat zvuková
upozornění (tyto možnosti upozornit přehráním zvuků jsou
podrobně popsány dále). Protože je možné přehrát libovolný
zvukový soubor (např. krátké WAV upozornění stejně jako celou
MP3 skladbu), bylo přidáno tlačítko Mute do nástrojové lišty
SIPS. Kliknutí na tlačítko zastaví přehrávání
jakéhokoliv zvuku. Klávesa <Esc> také zastaví
přehrávání.
Paralelní vykonávání kritických algoritmů
SIPS v2 přesunul všechny déle trvající úkoly (např. stažení
snímku z kamery, ale také otevírání velkých souborů,
kalibrace a transformace množin obrazů apod.) do prováděcích
toků na pozadí, takže uživatelské rozhraní již není těmito
úkoly blokováno a reaguje bezprostředně. Následné verze pak
přidávaly paralelní vykonávání kritických algoritmů na více
jádrových procesorech. To je zvláště důležité poté, co
jednojádrové procesory zmizely z trhu a i ten
nejlevnější a nejpomalejší PC dokáže zpracovávat nejméně dva
procesy současně. Pokud je software schopen vykonávat vždy jen
jediný úkol, polovina výpočetní kapacity zůstane nevyužita.
Moderní procesory dokáží zpracovat čtyři, šest nebo i osm
úkolů současně, takže správné rozdělení práce mezi více
výpočetních jader urychlí zpracování až 8 krát (tato informace
samozřejmě velmi brzy zastará, jakmile se v běžných
procesorech objeví ještě více jader).
SIPS je navržen aby rozdělil časově náročné úkoly mezi
všechna výpočetní jádra, která jsou k dispozici. Počet
jader není nijak limitován. Pokud je např. PC vybaven dvěma
procesory a každý je schopen vykonávat současně 8 procesů,
SIPS rozdělí práci na 16 prováděcích toků aby využil všechen
výkon, který moderní procesory nabízí.
Následující algoritmy jsou
paralelizovány:
Výpočet statistiky obrazů (střední hodnoty, extrémy,
směrodatné odchylky apod.) a konverze 16 nebo
32 bitových FITS souborů do 8 bitových bitmap,
které mohou být zobrazeny na obrazovce počítače. To
urychluje otevírání souborů stejně jako zpracování obrazů
stažených z kamery. Programový binning (zmenšování) a převzorkování
(zvětšování). Hledání hvězd v obraze. Algoritmus hledání hvězd
je vyvoláván v řadě případů — např. když je více obrazů sesazováno před
sčítáním, při astrometrické redukci ale také při automatické
pointaci, kdy se vyhledává nejjasnější hvězda nebo je
sesazován celý vzor hvězd vůči referenčnímu snímku. Tento
algoritmus je obecně náročný a jeho paralelizace přináší
podstatné urychlení. Sub-pixelové posuny a obecná rotace, používaná při
sčítání nebo problikávání série snímků. Kalibrace obrazu při odečítání temného snímku
aplikaci flat-field. Poznamenejme, že tyto algoritmy
v SIPS zachovávají saturované pixely, aby dovolily
následným algoritmům detekovat, že dané pixely nemohou být
použity k astrometrickým nebo fotometrickým
měřením.
Jak je tedy SIPS rychlý na různých počítačích? Sestavili
jsme test skládající se z hledání hvězd na FITS snímku
velikosti 3072 × 3072 pixelů. Ve
snímku je téměř 25 000 hvězd, detekovaných
s přednastavenými limity (požadovaný poměr S/N apod.).
Ačkoliv je tento test paralelizován (pracuje na všech
jádrech), nejedná se o typickou „GPU-like“ úlohu,
provádějící danou operaci nad každým pixelem v obraze
(např. jako je Gaussian blur apod.). Hvězdy nejsou umístěny
v pravidelných rozestupech, mají různé FWHM apod. Tento
test také dobře prověřuje různé části CPU, jako je vyrovnávací
paměť (FIST soubor má ~18 MB
dat), většina výpočtů je prováděna v celých číslech, ale
používají se i algoritmy v plovoucí desetinné čárce
(např. výpočet směrodatné odchylky pixelů ve clonce
apod.).
| CPU |
Jádra |
Prováděcí toky |
Frekvence [GHz] |
Čas [s] |
| AMD C50 |
2 |
2 |
1,00 |
12,03 |
| Intel Atom D525 (HT off) |
2 |
2 |
1,80 |
9,65 |
| AMD E-450 |
2 |
2 |
1,66 |
7,14 |
| Intel Atom D525 |
2 |
4 |
1,80 |
6,28 |
| Intel Core 2 Duo T6600 |
2 |
2 |
2,20 |
3,56 |
| AMD Athlon X2 5200+ |
2 |
2 |
2,70 |
3,08 |
| Intel Pentium E6300 |
2 |
2 |
2,80 |
2,61 |
| Intel Core i5 2410M |
2 |
4 |
2,30/2,90 |
1,90 |
| Intel Core 2 Quad Q6600 |
4 |
4 |
2,40 |
1,89 |
| AMD A8-3870 |
4 |
4 |
3,00 |
1,66 |
| Intel Core i5 2500 |
4 |
4 |
3,30/3,60 |
0,89 |
| Intel Core i5 3570K |
4 |
4 |
3,40/3,80 |
0,80 |
| Intel Core i7 3770 (HT off) |
4 |
4 |
3,40/3,90 |
0,78 |
| Intel Core i7 3770 |
4 |
8 |
3,40/3,90 |
0,69 |
Čas standardního SIPS testu na různých CPU (nižší
je lepší) Výsledek je zřejmý — moderní
čtyřjádrové procesory Intel Core i5 a i7 nabízejí nejvyšší
výpočetní výkon při relativně velmi malé spotřebě energie.
Nárůst výkonu Core i7 oproti i5, způsobený zpracováním dvou
podprocesů na jenom jádře (technologie nazývaná
HyperThreading), je asi jen 10%.
Nástroj CCD Kamera
Většina nových vlastností se týká nástroje CCD Kamera.
Záložka Expozice
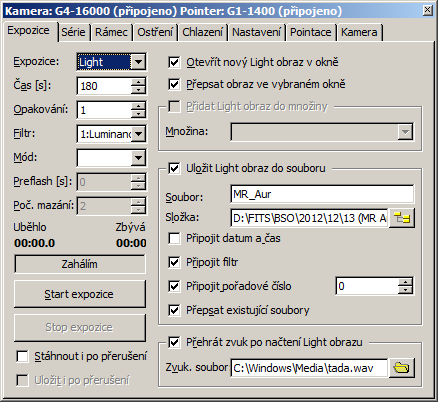
SIPS v2.1 byl rozšířen o podporu „preflash“
kamer série Gx. Pokud daná kamera preflash podporuje, jsou
povoleny nově přidané ovládací prvky Preflash
[s] and Poč. mazání. Preflash je určen
k potlačení jevu nazývaného Residual Bulk Image
(RBI). Efekt RBI je podrobně popsán v jiných
zdrojích, zde není prostor se jím detailně zabývat.
Jednoduše řečeno, většina CCD zachovává zbytek náboje po
expozici v substrátu čipu. Tento náboj jen zvolna
mizí (čím je CCD chladnější, tím déle vymizení trvá).
Výsledkem je, že hvězdný vzor, exponovaný po dlouhou dobu,
může být viditelný také na temných snímcích pořizovaných
bezprostředně po normálních snímcích. Zatímco stačí pouze
počkat určitou dobu před expozicí temných snímků (a
přizpůsobit pozorovací program tak, aby se temné snímky
nepořizovaly bezprostředně po normálních nebo flat
snímcích), RBI v některých CCD detektorech mizí tak
pomalu, že problém musí být řešen jiným způsobem. Na místo
čekání na „prázdný“ stav detektoru, CCD je
saturován infračerveným světlem LED uvnitř komory CCD. To
ponechá CCD v „plném“ stavu, čímž jsou sjednoceny
podmínky před začátkem každé expozice bez ohledu na to,
jaký typ snímku je pořizován.
To ale není bez nevýhod, CCD po preflash
v „plném“ stavu má vyšší temný proud ve
srovnání s „prázdným“ stavem. Pokud je hodnota
Preflash [s] nulová, preflash se kompletně
vypne. Pokud je nenulová, NIR LED jsou po danou dobu
rozsvíceny před každým snímkem a saturují CCD. Poté je
nutno CCD několikrát vyčistit před skutečnou expozicí.
Druhý parametr Poč. mazání dovoluje definovat
počet mazání provedených před každou expozicí. Optimální
hodnoty závisí typu CCD, na jeho teplotě apod. Jako obecné
pravidlo preflash po dobu několik sekund stačí na
kompletní saturaci detektoru a několikanásobné mazání
stačí na uvedení CCD do stavu, kdy je schopen expozice.
Ale každý uživatel může experimentovat s těmito
parametry nebo preflash vůbec nepoužívat v závislosti
na pozorovacím programu.
Upozornění: Preflash a následné mazání je prováděno před
každou expozicí (bias, dark, light, flat). Čas potřebný
k několika sekundám saturace a následnému opakovanému
mazání CCD značně prodlužuje dobu provedení každé
expozice. Ovlivňuje zvláště krátké expozice, u nichž
tato režie může být vyšší než doba samotné expozice a čas
potřebný ke stažení snímku. Byla přidána nová volba Stáhnout i po
přerušení. Zatímco volba Uložit i po
přerušení byla zařazena už do předešlých verzí,
obraz byl po přerušení expozice vždy stažen do počítače.
Nová volba dovoluje uživateli zvolit jestli má být
přerušený snímek okamžitě zahozen nebo alespoň stažen do
PC, i když nebude ukládán.
Poslední nová funkce je možnost definovat zvuk, který
bude přehrán po skončení expozice a stažení obrazu do PC.
Zvukový soubor může být libovolného typu (WAV, WMA nebo
MP3). Zvukové soubory jsou definovány samostatně pro každý
typ expozice (light, dark, atd.).
Záložka Série
Série expozic byly také doplněny o možnost přehrát
zvuk po ukončení celé série. Stačí zaškrtnout volbu
Zvuk na konci série a zadat soubor se
zvukem.
Záložka Rámec
Byla výrazně urychlena možnost definice binningu.
Především je mnohem snadnější nastavit základní binning
1 × 1 kliknutím na tlačítko,
např. po nastavení požadovaného zorného pole, což je
operace často prováděná v maximálním binningu aby se
urychlilo stahování snímků.
Také nově přidaný ovládací prvek XY-binning
nastavuje binning současně v obou osách. Současné
nastavení je ale limitováno jen do hodnoty binningu
menšího maximálního binningu ve vodorovném a svislém
směru. Pokud např. kamera nabízí vodorovný binning
v rozsahu 1..4 a svislý binning v rozsahu 1..16,
společný binning může být nastavován pouze v rozsahu
1..4.
Tip: Tlačítko Ostřicí rámec nastavuje
velikost podrámce na 192 × 192 bodů, což je velikost obrazu
v záložce Ostření. Ale ostření bylo rozšířeno
o možnost rolování většího podrámce a není tedy
nezbytné z kamery vyčítat pouze tak malý podrámec.
Tato vlastnost je podrobně popsána v následující
sekci. Záložka Ostření
Záložka Ostření prodělala nejrozsáhlejší změny.
Podrámec používaný pro ostření není nadále omezen na
velikost 192 × 192 bodů.
Obrazový panel Oblast ostření zobrazuje
rolovací lišty, pokud je podrámec čtený z kamery
větší (případně může být vyčítán celý obraz). Nicméně
panel Profil nejjasnějšího pixelu zobrazuje
historii profilů pouze z viditelné části vyčítaných
obrazů.
Výška panelu Profil nejjasnějšího pixelu
byla zmenšena na polovinu, aby se vytvořilo místo pro nový
panel Historie nejjasnějšího pixelu. Tento
panel ukazuje velikosti nejjasnějšího pixelu
u předchozích expozic, což dovoluje volbu optimální
pozice zaostření.
Nejdůležitější rozšíření je schopnost
automaticky zaostřit obraz hvězd. Automatické ostření je
založeno na předpokladu, že nejlépe zaostřený obraz
hvězd vytvoří v centru nejvyšší hodnoty pixelů.
Takže úkol ostřicí procedury je nalézt pozici
okulárového výtahu, ve které nejjasnější hvězda
zobrazená v panelu Oblast ostření
dosáhne nejvyšší hodnoty pixelů. Automatické ostření je
prováděno ve třech krocích:
SIPS se pokusí najít „sklon“ maximální
hodnoty pixelu na následujících snímcích pořízených
v rozdílných polohách okulárového výtahu. To
poskytne informaci o směru pohybu, v němž se
obraz hvězdy zlepšuje. Upozornění: Automatické
ostření musí začínat z pozice okulárového výtahu,
ve které je ještě zřetelný obraz hvězd
s dostatečným poměrem S/N. To znamená, že
nejjasnější pixel v obrazu hvězdy musí být
spolehlivě nad úrovní šumu pozadí. Aktuálně používaný
algoritmus není navrhován pro zaostření kompletně
rozostřeného obrazu, na němž není patrné nic kromě
šumu. Program poté provede řadu expozic s různou
pozicí okulárového výtahu do doby než je v historii
maximální hodnoty pixelu zřetelně rozlišitelné maximum.
SIPS zkouší historií proložit kvadratickou funkci
y = a.x2 + b.x + c a
pokud maximum této funkce leží v prostřední třetině
rozsahu pozic okulárového výtahu, ve které byly
prováděny expozice, pozice optimálního zaostření je
nalezena právě v tomto maximu. Tip: Oba
kroky 1 a 2 posouvaní mezi expozicemi okulárový výtah
o zadaný počet kroků (parametr Kroků ostření
na posun). Malá hodnota tohoto parametru nevede
automaticky k lepšímu zaostření. Každý posun by měl
být relativně velký, aby způsobil podstatné změny
v obraze. Hodnota nejjasnějšího pixelu je ovlivněna
seeingem, nepravidelnostmi pohybu montáže, pozicí hvězdy
vzhledem k jednotlivým pixelům snímače apod. Tyto
nepravidelnosti ovlivňují hodnotu maximálního pixelu
mnohem více kolem optimálního zaostření než pokud je
obraz rozostřen. Je žádoucí, aby rozsah jednotlivých
vzorkovaných hodnot byl velký, od zjevně rozostřeného
obrazu po správně zaostřený. Okulárový výtah je nakonec přesunut do bodu
maximální hodnoty proložené kvadratické funkce.
Poznamenejme, že zatímco posun okulárového výtahu mezi
jednotlivými expozicemi je definován parametrem
Kroků ostření na posun, pozice nejlepšího
zaostření je vždy vypočítána s maximální přesností,
kterou dané motorizované ostření poskytuje.
Záložka Nastavení pointace
Záložka Nastavení pointace byla přepracována aby
využila mírně vetší velikosti celého okna nástroje CCD
Kamera. Povelová tlačítka v podobě malých ikon,
použitá u předešlých verzí vzhledem k omezenému
prostoru v okně, byla nahrazena standardními
povelovým tlačítky s textem.
Přibyly nové parametry Min. puls [s],
doplňující již existující Max. puls [s]. Tyto
parametry dovolují definici minimální délky pulsu
použitého ke korekci montáže. Pokud detekovaný rozdíl
v poloze vede na korekční puls pod tímto limitem,
korekční akce je kompletně přeskočena a odstartuje se nová
expozice pointační kamery.
Důležitá nová funkce je schopnost přehrát zvuk
v případě selhání pointace. Je možné definovat počet
následných selhání pointace aby nebylo varování spuštěno
předčasně, např. při selhání jen několika pointačních
expozic.
Tip: Varování způsobené selháním pointace je velice
dobrým indikátorem povětrnostních podmínek, protože
nejčastější důvod selhání je nemožnost detekce pointační
hvězdy vlivem oblačnosti. Nástroj GPS
Z nástroje GPS zmizela možnost nakopírovat přečtenou
polohu do nástroje Nová FITS Hlavička. Ve skutečnosti je stále
možné používat souřadnice z GPS v hlavičkách nových
FITS souborů, pouze byl přehozen směr této akce. Na místo aby
GPS nástroj zapisoval souřadnice do jiných nástrojů, nyní tyto
jiné nástroje mají možnost přečíst souřadnice z GPS. Tato
změna byla motivována rostoucím počtem nástrojů, které
souřadnice potřebují (např. ovládání dalekohledu), takže tato
zodpovědnost byla přenesena do těchto nástrojů.
Tip: Windows Vista a Window 7 zavedly poněkud komplikovaný
systém uživatelských práv (privilegií). Protože zastaralý a
špatně navržený software často požaduje práva jako např.
možnost zápisu do adresáře Program Files, mnoho uživatelů
systému Windows pracuje s právy Administrátora systému,
aby takový software mohl pracovat. Toto ale eliminuje
bezpečnostní ochrany systému — administrátoři mohou měnit jakoukoliv část
systému, takže počítačové viry spuštěné v kontextu
privilegovaného uživatele ohrožují celý systém. Z tohoto
důvodu společnost Microsoft zavedla koncept
super-administrátora. Dokonce administrátor má poněkud omezené
pravomoci a pouze procesy, explicitně spuštěné s právy
super-administátora mohou modifikovat soubory operačního
systému, chráněné části Windows Registry apod. Mezi
blokovanými funkcemi je možnost změnit systémový čas. Pokud
tedy má SIPS upravit systémový čas podle údajů z GPS,
musí být spuštěn s právy super-administrátora. Jinak
nebude systémový čas synchronizován s GPS bez ohledu na
volbu Synchronizovat čas PC s časem
GPS. Nástroj Hlavičky nových FITS souborů
Nové povelové tlačítko Přečíst pozici z GPS
načte souřadnice z GPS a naplní jimi hodnoty hlaviček
LONG-OBS, LAT-OBS a ELEV-OBS. Tato funkce je samozřejmě
povolena jen pokud je nainstalován ovladač patřičné GPS a
přijímač je zapojen a poskytuje data.
Nástroj Řízení dalekohledu
Nástroj Řízení dalekohledu podstatně zredukoval množství
informací čtené z řídicích jednotek dalekohledů. Předešlé
verze programu SIPS vyčítaly z řídicí jednotky mimo
rovníkových souřadnic (R.A. a Dec.) také azimut, výšku
a čas. Ale procesory v řídicích jednotkách
dalekohledů jsou často relativně pomalé a výpočty azimutu a
výšky mohou spotřebovat značnou část jejich výpočetního
výkonu. Na druhé straně výpočetní výkon procesorů moderních PC
je úžasný a výpočet azimutu a výšky každých několik sekund
spotřebuje prakticky neměřitelně málo času procesoru. Proto
SIPS převzal tyto výpočty a provádí je v PC.
Čas použitý k převody R.A./Dec. na azimut a výšku je
systémový čas operačního systému. Pokud je tento čas
synchronizován s GPS, je velice přesný.
Další nezbytná informace potřebná k přepočtu R.A./Dec.
na azimut a výšku jsou zeměpisné souřadnice dalekohledu.
Nástroj řízení dalekohledu nově obsahuje editační řádky
Délka a Šířka, dovolující uživateli
definovat souřadnice. Přítomno je také tlačítko Přečíst
pozici z GPS. Tato funkce je samozřejmě povolena
jen pokud je nainstalován ovladač patřičné GPS a přijímač je
zapojen a poskytuje data.
Další novou funkcí nástroje řízení dalekohledu je schopnost
přehrát zvuk na základě dvou podmínek. První podmínka se
vztahuje k azimutu, druhá k výšce. Je možná přehrát
varování pokud daná souřadnice dalekohledu je menší nebo je
větší než zadaná mezní hodnota. Tato varování mohou být
použita např. k proložení německé rovníkové montáže po
průchodu meridiánem nebo k ukončení pozorování pokud
sledovaný objekt klesne pod danou výšku nad obzorem apod.
Poslední nová vlastnost nástroje řízení dalekohledu je
funkce jednoduchého katalogu. V rámci SIPS v2.1 je
dodáván nový soubor nazvaný 'catalog.ini'. Je to
jednoduchý textový soubor, takže každý uživatel jej může
libovolně editovat, případně vytvářet vlastní varianty tohoto
souboru. SIPS vždy čte soubor pojmenovaný
'catalog.ini', pokud jsou provedeny jakékoliv změny
nebo má být použit jiný soubor, je vždy nezbytné aby se
jmenoval 'catalog.ini' a byl umístěn
v adresáři, kde je umístěn celý SIPS (z něhož je
spouštěn soubor 'sips.exe').
Funkce katalogu je jednoduchá. Pokaždé když je vybrána
nějaká položka nějakého katalogu, souřadnice ze záznamu jsou
nakopírovány do editačních řádků Nová R.A. and
Nová Dec. Poté je možné na souřadnice najet (GOTO)
nebo synchronizovat polohu dalekohledu.
Struktura souboru 'catalog.ini' je následující.
Jednotlivé sekce jsou požity jako jednotlivé katalogy,
zobrazené v prvním výběrovém seznamu. Jména sekcí jsou
v souboru uváděna v hranatých závorkách. Následující
řádky reprezentují jednotlivé záznamy v každém katalogu a
jsou zobrazeny ve druhém výběrovém seznamu.
[M]
1 5 34 30 22 01 0 Tau 8.4m Pl (Crab Nb)
2 21 33 30 -00 49 0 Aqr 6.5m Gb
3 13 42 12 28 23 0 CVn 6.4m Gb
[NGC]
1 0 7 18 27 43 0 Peg Gx 12.9m
6 0 9 30 33 19 0 And Gx 13m
14 0 8 48 15 49 0 Peg Gx 12.1m
Tento příklad definuje dva katalogy pojmenované M a
NGC se třemi záznamy v každém katalogu. Každý záznam je
tvořen následujícími položkami oddělenými
mezerami:
Jméno položky, zobrazené ve druhém výběrovém seznamu.
Shodou okolností jsou položky Messierova i NGC katalogů
pojmenovány pořadovými čísly, ale první položka nemusí být
jen číslo. Jen je potřeba si uvědomit, že položky jsou
odděleny mezerami, takže jméno nesmí mezery obsahovat. Pokud
například zavedeme nový katalog [GCVS] a požadované jméno
položky bude „MR Aur“, je nezbytné použít např.
identifikátor MR_Aur nebo podobný zápis bez mezer. Další tři položky jsou hodiny, minuty a sekundy R.A.
souřadnice. Poslední číslo (sekundy) může obsahovat
desetinnou tečku. Následující tři položky jsou stupně, minuty a sekundy
Dec. souřadnice. Poslední číslo (sekundy) opět může
obsahovat desetinnou tečku. Zbytek řádku je považován za poznámku, která je
zobrazována pod výběrovými seznamy katalogu. Mezery již
neoddělují položky a jsou zobrazeny v rámci
poznámky.
Nástroj Ostření
Okno nástroje řízení ostření nově zobrazuje stav ostření
(Stojí/Pohybuje se). Také pokud řídicí jednotka ostření dokáže
měřit teplotu, bude tato teplota v okně řízení ostření
zobrazena.
Nástroj Řízení kopule
Řízení kopule v SIPS bylo také mírně pozměněno. Pokud
elektronika řízení kopule poskytuje informace o teplotě a
oblačné pokrývce, je tato informace v nástroji řízení
kopule zobrazena. Další možnosti, jako např. zvuková
upozornění při překročení mezní hodnoty oblačné pokrývky,
budou implementovány v následujících verzích.
Opravy chyb
Následujíc problém byly opraveny:
Ovladač sériové linky (COM port), použitý ke komunikaci
s řadou jednotek (dalekohledy, GPS, ...), byl rozšířen aby
správně pracoval s některými převodníky USB/RS-232C,
specificky v prostředí 64-bitových systémů
Windows. Ovladač sériové linky vkládá prefix '\\.\'
před jméno COM portu, pokud není možné zadaný port otevřít. Opět
tato funkce je implementována, aby ovladač pracoval spolehlivěji
s ovladači různých USB/RS-232C převodníků, které správně
nepracují se jmény COM rozhraní. Ovladač NMEA GPS správně určuje počet satelitů
v dohledu. Předešlé verze ovladače mohly zobrazovat chybný
počet satelitů. Ovladače GPS, dalekohledu a kopule mohly zůstávat
aktivní, i když uživatel zvolil jiný ovladač. Ovladač protokolu NexStar neobnovil správně tracking
mode, pokud byla operace GOTO přerušena tlačítkem Stop. FITS obrazy nebyly správně zobrazovány na systémech
s více monitory, u kterých byl sekundární monitor
vlevo od primárního monitoru (x souřadnice sekundárního monitoru
byla záporná). Část obrazu zobrazená v záložce Ostření nástroje CCD
Kamera nezobrazoval správný podrámec (byla použita invertovaná
souřadnice podrámce). Nástroje Hlavičky nových FITS souborů a Transformace
nových obrazů promítly změny jen při výběru nového nástroje nebo
zavření okna s nástrojem. To znamenalo, že změny se
u opakovaně prováděných čtení obrazů z kamery
neprojevily, pokud nebylo vybráno jiné okno. Ovládací prvky SIPS byly přepracovány, aby se správně
překreslovaly pokud je zapnuto vyhlazování textu na obrazovce
ClearType. Technologie ClearType vyhlazuje tvary písmen
prolínáním jejich okrajů s barvou pozadí. Aby tato
technologie správně fungovala, je nutné aby program nikdy
nepřepisoval stejný text vícekrát přes sebe bez překreslení
pozadí.
SIPS v2.1 je možné zdarma stáhnout se sekce download tohoto WWW serveru.
|
