|
Kamery C0, CG a C1 sdílí většinu vlastností, jako jsou použité
senzory, USB rozhraní, autoguider port, atd. Na první pohled, jediný
rozdíl mezi oběma řadami je jen jejich velikost a tvar.

Kamery C0 Nejdůležitější změna u kamer CG je jejich zploštělý tvar.

Kamery CG Větší rozměry modelů C1 dovolují přidání několika vlastností, které
nejsou u kamer C0 k dispozici, jako je chladicí ventilátor a závitové
otvory pro upevnění kamery.

Kamery C1 Kamery C0 nebo C1 někdy nelze použít s mimoosým adaptérem (OAG)
kvůli své mechanické konstrukci. Tyto kamery přesahují přední rovinu
OAG závitu, a proto mohou případně překážet při uchycení na zadní
části dalekohledu. Nové kamery CG jsou navrženy tak, aby svými rozměry
nepřesahovaly OAG směrem k dalekohledu. Jinak jsou ale kamery CG
identické s kamerami C0, pouze používají plochý plášť.
C5 kamera s XL filtrovým kolem, C5-OAG a pointační kamerou
CG
| Vlastnost |
C0 |
CG |
C1 |
| Rozměry |
50 × 50 × 40,4 mm |
50 × 34 × 68 mm |
57 × 57 × 46,4 mm |
| Hmotnost |
115 g |
138 g |
170 g |
| Chladicí ventilátor |
Ne |
Ne |
Ano |
| Stativový a metrické závity |
Ne |
Ne |
Ano |
, CG (uprostřed) a C1 (vpravo)")
Srovnání kamer C0 (vlevo), CG (uprostřed) a C1
(vpravo) Kamery C0, CG a C1 jsou vybaveny CMOS snímači Sony IMX s
globální závěrkou a čtvercovými pixely velikosti
3,45 × 3,45 μm.
Jednotlivé modely se liší pouze rozlišením.
Všechny použité senzory jsou vybaveny tzv. „globální
závěrkou“. To znamená, že všechny pixely obrazu jsou exponovány ve
stejný čas, na rozdíl od senzorů s tzv. „rolující závěrkou“,
které exponují jednotlivé řádky obrazu jeden po druhém. Pro dlouhé
expozice statických objektů v tom není rozdíl, ale při snímání
pohybujících se objektů krátkými časy způsobují senzory s rolující
závěrkou deformace obrazu.
K dispozici jsou dvě řady kamer, lišící se dynamickými
rozsahy (bitovou hloubkou digitalizovaných pixelů):
Kamery se senzory Sony IMX podporujícími 8 a 12 bitovou
digitalizaci. Protože každý 12 bitový pixel zabere při přenosu do PC dva byte,
stažená 12 bitového snímku zabere delší čas než stažení 8 bitového
snímku. Maximální FPS je v 8 bitovém módu podstatě vyšší. Kamery se senzory Sony IMX podporujícími jen 12 bitovou
digitalizaci. Pro dlouhé expozice (astronomická fotografie,
vědecký výzkum) je vždy používána přesnější 12 bitová digitalizace a
nižší doba stažení snímku v 8 bitovém módu tak jako tak není
využívána. Jestliže jsou všechny ostatní parametry kamer stejné
(rozměry senzoru, rozlišení, velikost pixelu, šum, …), nižší cena
těchto kamer tak může být velice atraktivní.
Kamery s 8 bitovou i 12 bitovou digitalizací:
| Model |
CMOS senzor |
Rozlišení |
Velikost pixelu |
Plocha snímače |
| C0/CG/C1-1500 |
IMX273 |
1456 × 1088 pixelů |
3,45 × 3,45 μm |
5,02 × 3,75 mm |
| C0/CG/C1-3000 |
IMX252 |
2064 × 1544 pixelů |
3,45 × 3,45 μm |
7,12 × 5,33 mm |
| C0/CG/C1-5000 |
IMX250 |
2464 × 2056 pixelů |
3,45 × 3,45 μm |
8,50 × 7,09 mm |
| C1-12000 |
IMX253 |
4112 × 3008 pixelů |
3,45 × 3,45 μm |
14,19 × 10,38 mm |
Kamery s pouze 12 bitovou digitalizací:
| Model |
CMOS senzor |
Rozlišení |
Velikost pixelu |
Plocha snímače |
| C0/CG/C1-3000A |
IMX265 |
2064 × 1544 pixelů |
3,45 × 3,45 μm |
7,12 × 5,33 mm |
| C0/CG/C1-5000A |
IMX264 |
2464 × 2056 pixelů |
3,45 × 3,45 μm |
8,50 × 7,09 mm |
| C1-12000A |
IMX304 |
4112 × 3008 pixelů |
3,45 × 3,45 μm |
14,19 × 10,38 mm |
Kamery C0, CG a C1 jsou navrženy pro spolupráci s řídicím
počítačem (PC). Na rozdíl od např. digitálních fotoaparátů, které
pracují nezávisle na počítači, vědecké kamery obvykle vyžadují
počítač pro řízení práce, stahování, zpracování a ukládání snímků
atd. K ovládání kamery je zapotřebí počítač, který:
Je kompatibilní se standardem PC a provozuje moderní 32 nebo
64 bitový operační systém Windows. Je kompatibilní se standardem PC a provozuje 32 nebo
64 bitový operační systém Linux. Podporovány jsou také počítače Apple Macintosh s procesory
x64.
Kamery používají ke spojení s řídicím PC rozhraní USB 3.0,
pracujícím na rychlosti 5 Gbps. Jsou ale také kompatibilní s rozhraním
a kabely USB 2.0.
Alternativně je možné použít rozhraní Moravian Camera Ethernet
Adapter. Tento adaptér dokáže připojit až 4 kamery série Cx (s
CMOS snímači) nebo Gx (s CCD snímači) a nabízí 1 Gbps a 10/100 Mbps
rozhraní Ethernet pro přímé spojení s řídicím počítačem. Protože
počítač pak s kamerami komunikuje protokolem TCP/IP, je možné do cesty
vložit např. WiFi most nebo jiné síťové zařízení.
Tip: USB standard nedovoluje použití USB kabelů delších než asi 5
metrů a USB 3.0 kabely jsou ještě kratší, aby bylo možné dosáhnout
velmi vysoké přenosové rychlosti. Na druhé straně komunikační protokol
TCP/IP, použitý ke spojení s kamerou přes síť Ethernet, je
směrovatelný, tedy vzdálenost mezi kamerou a řídicím počítačem může
být prakticky neomezená. Kamery C0, CG a C1 nepotřebují k práci žádný další zdroj energie,
jsou napájeny přes USB rozhraní z řídicího počítače.
Poznamenejme, že kamera musí být připojena k nějakému optickému
systému (např. k dalekohledu), aby mohla vracet snímky. Kamera dokáže
exponovat dlouhou dobu, nezbytnou k zachycení velmi slabých objektů.
Pokud má být kamera používána s dalekohledem, musí být celá sestava
dalekohledu a montáže schopná plynule sledovat objekt po obloze během
dlouhých expozic.
Systém kamer C0, CG a C1
Komponenty systému kamer C0 a C1 zahrnují:
Kamera C0 s CS-mount adaptérem Kamera C1 s CS-mount adaptérem Kamera C0 s kombinovaným adaptérem T-závit (M42×0.75) a
CS-mount Kamera C1 s kombinovaným adaptérem T-závit (M42×0.75) a
CS-mount Adaptér pro standard 1,25” okulárových
výtahů Krátký (10 mm) adaptér
1,25", určený pro použití s OAG Off-Axis Guider adaptér (OAG) pro chlazené kamery C1+ a
C2. Prodlužující adaptér se závitem M48 × 0,75 a vzdáleností
ohniskové roviny 55 mm Prodlužující adaptér se závitem M42 × 0,75 a vzdáleností
ohniskové roviny 55 mm (standardní
T-závit adaptér) Adaptér pro objektivy Canon EOS Adaptér pro objektivy Nikon
Verze kamer C1
Kamery C1 prošly několika inovačními cykly. Verze 1 a 2 se liší
pouze interně a navenek jsou pro uživatele nerozlišitelné. Třetí
iterace kamer C1 ale dovolila kamery zkrátit o 7 mm a odlehčit o 45 g. Kromě menšího a lehčího těla kamer ale
všechny další vlastnosti (použité senzory, USB a autoguider
rozhraní, časy stažení, …) zůstávají stejné.
 a v1/v2 (vpravo) ukazuje rozdíl v tloušťce")
Porovnání kamer C1 v3 (vlevo) a v1/v2 (vpravo) ukazuje
rozdíl v tloušťce Elektronika kamery
Hlavní role elektroniky CMOS kamery, mimo inicializace a
ovládání některých pomocných funkcí, je přenos dat z CMOS
detektoru do řídicího PC ke zpracování a ukládání. Na rozdíl od
kamer s CCD detektory, návrh kamery s CMOS čipy nedokáže ovlivnit
řadu důležitých parametrů, jako např. dynamický rozsah (počet bitů
na pixel).
Linearita senzoru
Odezva senzoru na světlo je velmi lineární. To znamená, že
kamera může být použita také pro nenáročné výzkumné projekty,
jako je např. fotometrie jasných proměnných hvězd apod.
 na světlo")
Odezva kamery C1-3000 (IMX252) na světlo Rychlost stahování
Již bylo uvedeno že existují dvě série kamer C0, CG
a C1, lišících se použitými senzory. První série nabízí
čtyři čtecí módy:
8 bitový pomalý mód s rychlostí digitalizace
~132 MPx/s 12 bitový pomalý mód s rychlostí
digitalizace ~72 MPx/s 8 bitový rychlý mód s rychlostí digitalizace
~263 MPx/s 12 bitový rychlý mód s rychlostí
digitalizace ~132 MPx/s
„A“ verze kamer C0, CG a C1 nabízí pouze
jeden čtecí mód:
Výše uvedené rychlosti digitalizace jsou platné pro USB 3.0
připojení. Také poznamenejme, že časy stahování snímků nevedou
automaticky na odpovídající počet snímků za sekundu (FPS),
protože stažený snímek je zpracován a zobrazen, což rovněž
spotřebovává čas. Tento čas je zanedbatelný, pokud kamera
potřebuje na stažení snímku sekundy nebo i desítky sekund. Ale
v případě rychlé CMOS kamery je čas potřebný ke zpracování
snímku v PC (např. výpočet směrodatné odchylky snímku apod.)
významný a může být delší než skutečná doba stahování.
Zisk kamery
Senzory použité v kamerách C0, CG a C1 nabízí
programovatelné zesílení 0 do 24 dB, což znamená násobení
výstupního signálu 1× až
15,9×. Zesílení
může být nastavováno s krokem 0,1 dB.
Převodový poměr a čtecí šum
Obecně řada vlastností senzoru závisí na zesílení. Dále
tedy uvádíme parametry současně pro minimální i maximální
zesílení.
| Přesnost digitalizace |
12-bit |
12-bit |
8-bit |
8-bit |
| Zesílení senzoru |
0 dB |
24 dB |
0 dB |
24 dB |
| Plná kapacita pixelu |
11000 e- |
1100 e- |
2600 e- |
1100 e- |
| Převodní faktor |
2,8 e-/ADU |
0,3 e-/ADU |
10,0 e-/ADU |
4,4 e-/ADU |
| Čtecí šum |
2,2 e- RMS |
2,0 e- RMS |
4,2 e- RMS |
9,7 e- RMS |
Ovládání expozice
Kamery C0, CG a C1 jsou schopny velice krátkých expozic.
Nejkratší expoziční doba je 125 μs
(1/8000 sekundy). To je současně také krok, v němž je délka
expozice zadávána. Tedy druhá nejkratší expozice tedy je
250 μs atd.
Ovládání dlouhých expozic je ovládáno z řídicího PC a pro
maximální délku expozice neexistuje žádný limit. Ve
skutečnosti je nejdelší expozice omezena saturací senzoru buď
dopadajícím světlem nebo temným proudem (viz. následující
podkapitola).
Chlazení senzoru
Temný proud je vlastnost všech křemíkových obvodů. Je nazývaný
„temný“, protože je generovaný bez ohledu na to, jestli na
senzor dopadá světlo nebo ne. Temný proud, tekoucí do jednotlivých
pixelů, se v obraze projeví jako šum. Čím je expozice delší, tím
větší množství šumu je přítomno v každém snímku. Protože je
generovaný náhodnými pohyby částic, exponenciálně závisí na
teplotě (z tohoto důvodu se šum generovaný temným proudem také
označuje jako „tepelný šum“). Pokud se teplota senzoru
sníží typicky o 6 až 7 °C, temný
proud klesne na polovinu.
Zatímco žádná z kamer C0, CG nebo C1 není vybavena
termoelektrickým (Peltiérovým) chlazením, modely C1 obsahují malý
ventilátor, vyměňující vzduch v těle kamery. Navíc přímo na zadní
straně senzoru je malý chladič (s výjimkou kamery C1-1500, jejíž
senzor pro umístění chladiče příliš malý), který z něj odvádí co
nejvíce tepla. Senzor kamer C1 tedy nemůže být chlazen po teplotu
okolí, ale jeho teplota je udržována tak blízko okolní teplotě jak
jen je to možné. Ve srovnání se zcela uzavřenými kamerami může být
teplota snímače v kamerách C1 o 7 až 10°C menší a
výsledný temný proud je méně jak poloviční.
Vstup chladicího vzduchu je na pravé straně kamery
(vlevo), zatímco výstupy jsou na protější straně
(vpravo) Funkce ventilátoru může být ovládána z řídicího počítače.
Program SIPS přímo nabízí posuvník nastavující ventilátor v
záložce „Cooling“ okna nástroje ovládání hlavní kamery.
Ovladače kamery pro jiné programy nabízejí ovládání ventilátoru v
dialogovém okně konfigurace ovladače.
Senzor se v kameře C0-1500 bez ventilátoru zahřeje asi
o 7°C nad okolí (vlevo), zatímco teplota senzoru v kameře
C1-1500 s běžícím ventilátorem zůstává blízko teploty okolí
(vpravo) „Autoguider“ konektor
Řada zejména masově vyráběných montáží hvězdářských dalekohledů
není natolik precizní, aby udržela obraz hvězd perfektně kruhový
během dlouhé expozice bez korekcí jejího chodu. Chlazené
astronomické kamery a digitální zrcadlovky dovolují pořizovat
perfektně ostré snímky s vysokým rozlišením, takže i malá
nepravidelnost v chodu montáže se projeví deformací obrazu hvězd.
Kamery C0, CG a C1 byly navrhovány speciálně pro automatické
pointování montáží astronomických dalekohledů.
Pointační kamery nemají mechanickou závěrku ani jinou
pohyblivou součást (s výjimkou magneticky levitujícího
ventilátoru). Elektronická závěrka dovoluje velmi krátké expozice
a rovněž bez problémů zvládne pořízení tisíců snímků během krátké
doby, což je nezbytné pro kvalitní pointaci.
Kamery C0, CG a C1 pracují ve spolupráci s počítačem (PC).
Korekce chodu montáže nejsou počítány ve vlastní kameře, ta jen
odesílá snímky do řídicího počítače. Software pracující v PC poté
spočítá rozdíl od požadovaného stavu a pošle korekce montáži
dalekohledu. Výhodou použití PC k výpočtu korekcí je skutečnost,
že současné počítače disponují výpočetním výkonem, který o mnoho
řádů přesahuje výkon i toho nejlepšího procesoru zabudovaného v
kameře. Algoritmy pointace pak mohou určit centroid hvězdy se
sub-pixelovou přesností, mohou srovnávat více hvězd a tím omezit
vliv seeingu apod.
Vypočítané korekce mohou být odeslány zpět montáži
prostřednictvím komunikační linky mezi montáží a PC. Pokud ale
řídicí jednotka montáže nepodporuje tuto funkci (příkazy „Pulse
Guide“) lze použít tzv. „Autoguider“ portu. Stačí spojit
kameru s montáží 6 žilovým kabelem a řídit montáž prostřednictvím
kamery.
Maximální proud, který může každý pin kamery C0, CG a C1
spínat, je 400 mA. Pokud montáž nepracuje s autoguider portem jako
s logickými vstupy, ale spíná jimi přímo korekční motory, musí být
mezi kameru a montáž vřazen reléový oddělovač, který bezpečně
zaručuje spínání motorů montáže.
Standardní 6 pinový Autoguider port horní straně kamer
C1 a C0 (vlevo) a na zadní straně kamer CG (vpravo) Autoguider port odpovídá de-facto standardu zavedenému
automatickým pointerem SBIG ST-4. Význam pinů v konektoru je
následující:
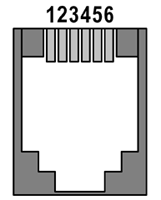 |
| 1 |
R.A. + (Vpravo) |
| 2 |
Dec + (Nahoru) |
| 3 |
Dec – (Dolů) |
| 4 |
R.A. – (Vlevo) |
| 5 |
Common (Zem) |
| 6 |
Nezapojeno |
|
Mechanické specifikace
Hlava kamer C0, CG a C1 je navrhována aby byla malá a lehká aby
ji bylo možné uchytit i k malým dalekohledům a hledáčkům.
Hlava je frézována z kvalitní hliníkové slitiny a černě
eloxována. Hlava samotná obsahuje konektor USB-B 3.0 a standardní
6 pinový „autoguider“ konektor.
| Mechanická závěrka |
Ne |
| Nejkratší expoziční čas |
125 μs |
| Nejdelší expoziční čas |
Limitován pouze saturací senzoru |
| Rozměry hlavy kamery C0 |
50 mm × 50 mm × 40,4 mm (včetně CS adaptéru objektivu) |
| Rozměry hlavy kamery CG |
50 mm34 × mm × 68 mm (včetně CS adaptéru objektivu) |
| Rozměry hlavy kamery C1 |
57 mm × 57 mm × 47,4 mm (včetně CS adaptéru objektivu) |
| Vzdálenost ohniskové roviny |
12,5 mm
pro závit 1/32 UN (kompatibilní s CS-mount) |
| |
18,5 mm
pro závit M42 × 0,75 (T-mount) |
| Hmotnost hlavy kamery C0 |
115 g |
| Hmotnost hlavy kamery CG |
138 g |
| Hmotnost hlavy kamery C1 |
170 g |
Adaptéry pro dalekohled/objektiv
Kamery C0 a C1 jsou dodávány se dvěma typy adaptérů
pro objektivy a dalekohledy:
Adaptér se závitem 1/32 UN a vzdáleností ohniskové
roviny 12,5 mm
(CS-mount). Adaptér se závitem M42 × 0,75 (T-závit) a
vzdáleností ohniskové roviny 18,5 mm. Tento adaptér také obsahuje vnitřní
závit 1/32 UN se vzdáleností ohniskové roviny
12,5 mm
(CS-mount).
 a s kombinovaným T-závitem (M42 × 0,75) a CS-mount adaptérem (vpravo)")
Srovnání kamer C1 s jednoduchým CS adaptérem
(vlevo) a s kombinovaným T-závitem (M42 × 0,75) a CS-mount
adaptérem (vpravo) Kamery CG jsou dodávány pouze s CS-mount adaptérem.

Kamera CG s CS-mount adaptérem CS-mount je kompatibilní s širokým výběrem CCTV objektivů
standardu CS-mount. Pokud má být použit objektiv standardu
C-mount (se vzdáleností ohniskové roviny
17,5 mm), lze
použít jednoduchý 5 mm vysoký
závitový mezikroužek.
Upozornění: Pokud má být kamera použita s OAG pro chlazené
kamery řady Cx, musí být použit krátký (10 mm) 1.25” válcový
adaptér pro CS-závit. Tento adaptér, dodávaný spolu s každým
OAG je plně kompatibilní s kamerami C0 a
C1. Upozorňujeme, že kamery C0 a C1 s adaptérem
M42 × 0,75
(T-závit) nemohou být použity spolu s OAG, i když krátký 1.25"
válcový adaptér do nich lze zašroubovat. Velký průměr adaptéru
se závitem M42 koliduje s upevňovacími šrouby OAG portu pro
pointační kameru. Z tohoto důvodu jsou varianty kamer C0 a C1
s malým CS adaptérem stále dodávány. Válcový adaptér z C-mount na 1,25”,
kompatibilní se standardními 1,25” okuláry,
je přiložen ke každé kameře. Kamera C0 nebo C1 může být tedy
použita s prakticky libovolným astronomickým dalekohledem na
místo okuláru.
Rozhraní T-mount (také adaptér s T-závitem) je definováno
rozměry závitu M42 × 0,75 a také vzdáleností
ohniskové roviny 55 mm. Adaptér s
T-závitem pro kamery C0 a C1 nesplňují druhé kritérium, jeho
vzdálenost ohniskové roviny je pouze
18,5 mm.
Vzdálenost 55 mm je požadována
jen v některých případech a dodržení této relativně velké
vzdálenosti by vyžadoval poměrně rozměrný adaptér.
Nicméně je k dispozici prodlužovací díl s vnějším závitem
M42 × 0,75 na
jedné straně. Tento prodlužovací díl prodlouží vzdálenost
ohniskové roviny kamer C0 nebo C1 na 55 mm, jak je požadováno řadou reduktorů
ohniska, korektorů komy a dalších optických prvků.
Tento prodlužovací díl se vzdáleností ohniskové
roviny 55 mm je k dispozici ve
dvou variantách:
Se závitem M42 × 0,75 (T-závit) na
vzdálenější straně. S větším závitem M48 × 0,75 na vzdálenější
straně.
, prodlužující adaptér se vzdáleností ohniskové roviny 55 mm a závitem M42 × 0.75 (uprostřed) a se závitem M48 × 0.75 thread (vpravo)")
Kamera C1 (vlevo), prodlužující adaptér se
vzdáleností ohniskové roviny 55 mm a závitem M42 × 0,75 (uprostřed) a se
závitem M48 × 0,75 thread
(vpravo) K dispozici jsou také adaptéry s bajonetovými
rozhraními pro standardní fotografické objektivy :
Tip: Prodlužující díly mají vnější průměr přesně
2 palce
(50,8 mm), mohou
tedy být použity k upevnění kamery v jakémkoliv 2" okulárovém
výtahu na místa 2" okuláru. 
Kamera C1 připojeným objektivem standardu Canon
EOS „Stativový“ a metrické závity
 závit a 4 metrické M3 závitové otvory")
Spodní strana kamery C1 obsahuje standardní
0,25" (stativový) závit a 4 metrické M3
závitové otvory Pokud není kamera C1 uchycena k okulárovému výtahu
dalekohledu prostřednictvím adaptéru pro CS objektivy, může
být připevněna prostřednictvím šroubu na fotografických
stativech (0.25 palce). Další možnost je použití 4 metrických
závitových otvorů M3, také umístěných na spodní straně hlavy
kamery.

Pozice čtyř M3 závitových otvorů na spodní straně
hlavy kamery C1 v3 Závitové otvory jsou ve shodné vzdálenosti na všech verzích
kamer C1. Pouze u kamer C1 v1 a v2 jsou všechny otvory o
1 mm dále od čela kamery.

Pozice čtyř M3 závitových otvorů na spodní straně
hlavy kamery C1 v1 a v2 Rozměry kamer C0
Rozměry čelní strany kamery C0 s CS adaptérem
(vlevo) a rozměry boční strany, včetně vzdálenosti ohniskové
roviny (vpravo) Rozměry čelní strany kamery C0 s adaptérem
M42 × 0,75
(vlevo) a rozměry boční strany, včetně vzdálenosti ohniskové
roviny Rozměry kamer CG
Rozměry čelní strany kamery CG s CS adaptérem
(vlevo) a rozměry boční strany, včetně vzdálenosti ohniskové
roviny (vpravo) Rozměry kamer C1
Rozměry čelní strany kamery C1 s CS adaptérem
(vlevo) a rozměry boční strany C1 v3, včetně vzdálenosti
ohniskové roviny (vpravo) Rozměry čelní strany kamery C1 s adaptérem
M42 × 0,75
(vlevo) a rozměry boční strany C1 v3, včetně vzdálenosti
ohniskové roviny (vpravo) Podpora software
Vždy používejte poslední verze systémových ovladačů pro Windows
i Linux. Starší verze ovladačů nemusí podporovat nové modely kamer
(jako je C0), případně nové verze existujících řad (jako např. C1
verze 3).
Pokud je kamera ovládána přes Moravian Camera Ethernet
Adapter, vždy se ubezpečte, že firmware v jednotce je
aktualizován na nejnovější verzi.
Také vždy používejte polední verzi programu SIPS, starší verze
nemusí nové kamery správně podporovat. Pokud používáte ovladače
pro programy třetích stran (např. ASCOM nebo INDI), vždy ovladače
aktualizujte na polední verzi, která je k dispozici.
SIPS
Program SIPS (Scientific Image Processing System),
dodávaný spolu s kamerou, dovoluje kompletní ovládání kamer
(expozice, chlazení, výběr filtrů atd.). Také podporuje
automatické sekvence snímání přes různé filtry, s rozdílným
binningem apod. S plnou podporou ASCOM standardu může SIPS
ovládat celou hvězdárnu. Konkrétně montáže dalekohledů, ale
také další zařízení (motorová ostření, kopule nebo odsuvné
střechy, GPS přijímače apod.).
SIPS zahrnuje nástroje pro automatickou pointaci, včetně
tzv. „dithering“ (řízené vzájemné posuny mezi
jednotlivými snímky). Jsou podporovány oba způsoby ovládání
montáže — přes rozhraní
„autoguider“ port (kabel s 6 vodiči) a také
„Pulse-Guide API“ programové rozhraní ovladače montáže.
Pro velmi kvalitní montáže, schopné sledoval pole bez nutnosti
pointace po dobu jedné expozice, podporuje SIPS mezi-snímkovou
pointaci pouze na základě porovnávání snímků z hlavní
zobrazovací kamery.
")
SIPS ovládající celou hvězdárnu (zobrazen v tmavé
barevné paletě) Schopnosti programu SIPS nekončí u ovládání kamery a
hvězdárny. SIPS obsahuje řadu nástrojů pro kalibraci snímků,
práci s 16 a 32 bitovými FITS
soubory, zpracování celých množin snímků (např. medián množiny
apod.), transformace snímků, export snímků do běžných formátů
atd.
SIPS pracuje s FITS soubory, podporuje kalibrace i
zpracování snímků Protože prví „S“ ve zkratce SIPS znamená
„Scientific“ (vědecký), program podporuje astronomickou
redukci snímků a také fotometrické zpracování celých řad.
SIPS se soustřeďuje na astrometrické a fotometrické
zpracování snímků, ale obsahuje i základní funkce pro
zpracování astronomických fotografií Program SIPS je zdarma ke stažení z tohoto www serveru. Všechny funkce
jsou podrobně popsány v uživatelské příručce, nainstalované s
každou kopií programu.
Automatická pointace
Programový systém SIPS dovoluje automatickou pointaci
montáže dalekohledu s použitím samostatné pointační
kamery. Správně a spolehlivě pracující automatická
pointace využívající výhod výpočetního výkonu počítačů PC
(např. výpočet centroidu pointační hvězdy z mnoha pixelů
dovolující dosažení sub-pixelové přesnosti) není úplně
triviální úkol. Tomu odpovídá i množství parametrů, které
je nutno programu zadat (nebo nechat automaticky
určit).

Okno nástroje „Guider“ programu
SIPS Nástroj „Guider“ pak dovoluje automatickou
pointaci zapínat a vypínat, kalibrovat parametry pointace
a přepočítávat je po změně deklinace dalekohledu bez
nutnosti nové kalibrace. Nová kalibrace také odpadá po
přeložení německé montáže. Okno také zobrazuje časové
průběhy zjištěných odchylek pointační hvězdy v obou osách
od referenční polohy. Délka vlastního průběhu i rozsah
grafů jsou volně nastavitelné, takže jejich zobrazení lze
přizpůsobit nepřesnostem a délce periodické chyby dané
montáže. Také je zobrazován kompletní záznam o kalibraci,
zjištěných odchylkách, provedených korekcích apod. Záznam
lze kdykoliv uložit do textového souboru.
Alternativou klasické pointace je mezisnímková
pointace, navržená pro moderní montáže, které jsou natolik
přesné, že udrží chod se sub-pixelovou přesností po dobu
jediné expozice a viditelné nepravidelnosti se objeví až
za dobu přesahující několik expozic. Mezisnímková pointace
pak provádí jemné opravy polohy montáže mezi jednotlivými
expozicemi, což zamezuje „cestování“ snímaných
objektů po ploše detektoru během doby pozorování. Tato
metoda pointace používá hlavní kameru, nevyužívá další
pointační kameru a přirozeně nepotřebuje ani OAG nebo
samostatný pointační dalekohled.

Parametry mezisnímkové pointace v záložce
„Pointace“ okna nástroje Kamera Pokročilá rekonstrukce barev z barevných
kamer
Barevné snímače mají červené, zelené a modré filtry
(Bayerova maska) aplikovány přímo na jednotlivé
pixely.
Každý pixel registruje světlo pouze určité barvy
(červené, zelené nebo modré). Barevný snímek ale obsahuje
informaci o všech barvách v každém pixelu. Je tedy
nezbytné dopočítat ostatní barvy z hodnot okolních
pixelů..
Existuje řada způsobů jako dopočítat chybějící barvy
jednotlivých pixelů — od
jednoduchého rozšíření barev do okolních pixelů (tato
metoda vede k obrázkům s viditelnými barevnými chybami)
přes přesnější metody bilineární nebo bikubické
interpolace okolních pixelů až po sofistikované
víceprůchodové metody.
Bilineární interpolace poskytuje výrazně lepší výsledky
než prosté rozšíření chybějících barev do okolních pixelů
a přitom je dostatečně rychlá. Pokud je ale rozlišení
optiky blízké velikosti jednotlivých pixelů, u jemných
detailů vznikají barevné artefakty, jak ukazuje obrázek
dole vlevo.
Syrový obraz nahoře s barvami dopočítanými
bi-lineární interpolací (vlevo) a stejný syrový snímek,
ale zpracovaný víceprůchodovým algoritmem rekonstrukce
barev (vpravo) Víceprůchodová metoda je výrazně pomalejší ve srovnání
s jednoprůchodovou bilineární interpolací, její výsledky
jsou ale zejména v detailech výrazně lepší. Tato metoda
dovoluje využít rozlišení barevných kamer skutečně na
maximum.
SIPS nabízí volbu metody interpolace Bayerovy masky
v nástrojích „Image Transform“ i „New Image
Transform“. Pro rychlé náhledy nebo v případě, že
nejmenší zobrazený detail svými rozměry hodně převyšuje
velikost jednoho pixelu (ať již vlivem optiky či
atmosféry), je rychlá bilineární interpolace dostačující.
Pro nejlepší výsledky je ale vhodné použít víceprůchodovou
metodu.
Ovladače pro programy třetích stran
Pravidelně aktualizovaný Sofware Development Kit pro Windows dovoluje
ovládat všechny kamery z libovolných aplikací, stejně jako z
prostředí Python apod.
K dispozici jsou ovladače standardu ASCOM a také ovladače
po programové systémy třetích stran (např. TheSkyX, AstroArt,
atd.). Navštivte stránku download tohoto www serveru se seznamem všech
ovladačů.
Knihovny a ovladače standardu INDI pro 32 bitový i 64 bitový Linux pracující na procesorech x86 a
ARM jsou rovněž k dispozici ke stažení. S kamerou jsou dodávány také
ovladače pro program TheSkyX pracující pod systémem macOS.
První snímky s kamerou C1-3000
První prototyp kamery C1-3000 testoval známý
astro-fotograf Martin Myslivec. Používal refraktor Borg 77ED na
montáži EQ6 k pořízení řady expozic bez pointace. Ačkoliv si
uvědomujeme, že Martin je zkušený astro-fotograf, kamera C1 se
ukázala jako vhodná i pro snímání jasných objektů hlubokého
vesmíru.

„První světlo“ kamery C1-3000: M31 Velká galaxie
v Andromedě 
„První světlo“ kamery C1-3000: M42 Velká
mlhovina v Orionu 
„První světlo“ kamery C1-3000: mlhovina kolem
hvězd v otevřené hvězdokupě M45 Plejády Snímek M31 Velké galaxie v Andromedě je součet 197
expozic dlouhých 20 s (celková
expoziční doba asi 1 hodina a 5 minut). S výjimkou kalibrací
dílčích snímků a mírného nelineárního „stretch“ nebyl
snímek nijak dále zpracováván.
Snímek M42 Velké mlhoviny v Orionubyl zkombinován ze
dvou sad expozic (HDR snímek). Slabá mlhovina dále od středu
snímku byla snímána s použitím 100 expozic dlouhých 20 s (asi 33 minut
celkového expozičního času). Velmi jasná centrální část mlhoviny
byla fotografována expozicemi pouze 2 s dlouhými (opět jich bylo 100), což vede na
asi 3 minuty celkového expozičního času. Velmi krátké expozice
dovolily perfektně zaznamenat 4 centrální hvězdy (nazývané
Trapéz), aniž by došlo k jejich přeexponování.
Snímek M45 Plejád je kombinace 218 expozic dlouhých
20 s (celková expoziční doba asi
1 hodina a 12 minut). Opět nebyl snímek nijak zpracováván kromě
kalibrací a nelineárního „stretch“.
Slunce ve spektrální čáře Hα
Martin Myslivec použil svou kameru C1-5000 k zachycení
Slunce v čáře Hα. Podívejte se, co dokáže
kamera C1 při snímání Slunce.
| 